 50.005 CSE
50.005 CSE
- Dining Philosphers: Not So Hungery After All
- Visual Trace Exercise: Deadlock When Full
- Missed Notify with Separate Lock and Premature Signal
- Can This Bounded Buffer Deadlock?
- Circular Wait in Print Spooler and Scanner
- Banker’s Algorithm: Approve or Deny?
- The Banker’s Mistake
- The Unsafe Shortcut
- Dining Savages with Broken Pot Semaphore
- Preemption and Priority Inversion in Lock Acquisition
- The Ostrich Algorithm
- The Waiting Ring
- The Greedy Request
- The Forgotten Detector
- Deadlock in Bounded Buffer with Split Locks
50.005 Computer System Engineering
Information Systems Technology and Design
Singapore University of Technology and Design
Natalie Agus (Summer 2025)
Deadlock
Dining Philosphers: Not So Hungery After All
Background
The Dining Philosophers Problem is a classic illustration of deadlock and resource contention. Five philosophers sit around a table. Between each pair of philosophers is a single fork. To eat, a philosopher needs to pick up both the left and right fork. Philosophers alternate between thinking and eating.
In the naïve solution, each philosopher:
- Picks up the left fork.
- Picks up the right fork.
- Eats.
- Puts down both forks.
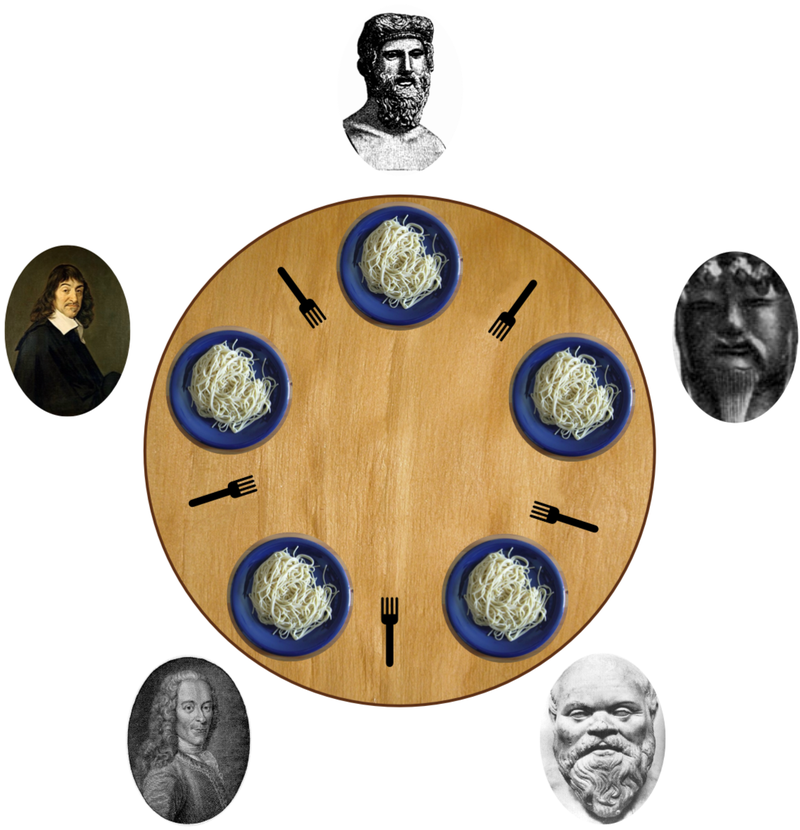
If all philosophers pick up their left fork at the same time, no one can pick up their right fork, and deadlock occurs.
Deadlock arises when four conditions are met. These are called the four Coffman conditions:
- Mutual exclusion (forks cannot be shared)
- Hold and wait (each philosopher holds one fork while waiting for the other)
- No preemption (forks are only released voluntarily)
- Circular wait (each philosopher waits on the next in a cycle)
Scenario
You are given a C-like pseudocode implementation of the philosophers’ behavior. Each philosopher runs the following:
while (true) {
think();
pick_up(left_fork);
pick_up(right_fork);
eat();
put_down(left_fork);
put_down(right_fork);
}
Forks are represented as mutexes. All philosophers start simultaneously. Deadlock sometimes occurs during execution.
Several alternate designs are proposed:
- Design A: Allow at most four philosophers to sit at the table at once.
- Design B: Impose a resource hierarchy by requiring philosophers to always pick up the lower-numbered fork first.
- Design C: Use a waiter (monitor) who grants permission to pick up forks only if both are available.
- Design D: Replace blocking
pick_up()with try-lock which check first if the second fork is unavailable, release the first and retry after thinking.
Answer the following questions:
- Identify which of the four Coffman deadlock conditions are satisfied in the original code.
- For each of the proposed designs (A–D), explain how they address the deadlock problem.
- Which designs also improve fairness or avoid starvation? Why?
- What are the trade-offs between centralized (Design C) and decentralized (Design D) control?
Hints:
- Think about how each design breaks one or more deadlock conditions.
- Consider whether philosophers may starve even if deadlock is avoided.
- For resource hierarchy, assume fork numbers range from 0 to 4 clockwise.
The original implementation satisfies all four Coffman conditions:
- Mutual exclusion: Forks are mutexes, only one philosopher can hold each.
- Hold and wait: Each philosopher holds one fork and waits for the other.
- No preemption: Forks are only released voluntarily.
- Circular wait: Each philosopher waits for the fork held by their neighbor.
Here's how each design address the problems:
- Design A: By limiting access to four philosophers, at least one can eat, preventing a full circular wait. This breaks the circular wait condition.
- Design B: Enforcing a global resource ordering (always pick lower-numbered fork first) ensures there can be no cycles in the wait-for graph. This breaks circular wait.
- Design C: A waiter grants both forks or none, so no philosopher holds one fork while waiting for the other. This breaks hold and wait.
- Design D: Philosophers do not hold one fork while waiting for the other. If they fail to acquire both, they release and retry later. This breaks hold and wait.
About fairness and starvation:
- Design B: Can cause starvation if unlucky philosophers always have higher-numbered forks.
- Design C: Can be made fair if the waiter uses a queue to grant forks.
- Design D: May lead to starvation if some philosophers retry too often without success.
Tradeoffs between Design C and D:
- Design C (centralized): Easier to enforce fairness, but adds a single point of failure and potential bottleneck.
- Design D (decentralized): More scalable and avoids central coordination, but harder to analyze for starvation and fairness.
Visual Trace Exercise: Deadlock When Full
Background: Circular Wait with Semaphores
In producer-consumer systems using semaphores, the order in which semaphores are acquired is critical. If a thread holds one semaphore while waiting on another, and other threads are waiting to acquire the first one, the system can enter a deadlock: a circular wait where no thread can proceed.
Let’s demonstrate how a subtle change in ordering can cause the system to freeze when the buffer becomes full.
Scenario
You attempt to optimize a bounded buffer implementation by locking access early. You reason: “Since the thread will use both mutex and empty, let’s acquire mutex first to avoid holding mutex too long after.”
Here’s the newly modified producer code:
sem_wait(&mutex);
sem_wait(&empty);
// insert into buffer
sem_post(&full);
sem_post(&mutex);
And here’s the existing consumer code:
sem_wait(&full);
sem_wait(&mutex);
// insert into buffer
sem_post(&mutex);
sem_post(&empty);
Problem
At runtime, the system works for a while. But occasionally, when the buffer becomes full, all producers and consumers block indefinitely although there are items in the buffer to be consumed.
Answer the following questions:
- What is the mistake in the order of semaphore operations?
- Show how deadlock can occur if one producer holds
mutexand is blocked onempty, while other threads are waiting formutex. - Why does this problem only show up under full buffer conditions?
- How should the semaphore order be fixed to prevent deadlock?
- Why is it safe to call
sem_wait(&empty)before locking the mutex?
Hints:
- Think about the scenario where the buffer has no more empty slots.
- A thread holding
mutexmust never block on another semaphore.- Blocking must happen before acquiring exclusive access.
Visual Timeline Example
Initial state: buffer is full (empty = 0)
T1 (Producer):
sem_wait(mutex) → succeeds (mutex = 1 → 0)
sem_wait(empty) → blocks (empty = 0)
T2 (Producer):
sem_wait(mutex) → blocks (mutex = 0)
T3 (Consumer):
sem_wait(full) → succeeds
tries to acquire mutex → blocks
→ All threads waiting on each other → deadlock
The mistake is that the producer acquires mutex before checking whether there is space in the buffer using sem_wait(&empty). If the buffer is full, the thread blocks on empty while still holding the mutex.
This causes deadlock because other threads (e.g. consumers) need to acquire the mutex to make progress but they can't, since it's held by a thread that is blocked. This creates a circular wait.
This issue only arises when the buffer is full (empty == 0). If there is space, sem_wait(&empty) returns immediately, and the problem doesn’t occur. But under high load, the blocking behavior becomes visible.
To fix this, reverse the order: call sem_wait(&empty) before acquiring the mutex. This way, a thread blocks before it holds any exclusive resources, avoiding circular waits.
It's safe to call sem_wait(&empty) before locking the mutex because empty is not protecting the buffer structure. It's only a count of how many slots are available. The mutex is what ensures safe access to shared memory, and should only be held when actually modifying the buffer.
Correct order for Producer code:
sem_wait(&empty); sem_wait(&mutex); // insert into buffer sem_post(&mutex); sem_post(&full);
Missed Notify with Separate Lock and Premature Signal
Background
In Java, wait() and notify() are used within synchronized(lock) blocks to allow threads to coordinate using an object’s monitor. However, unlike semaphores, notify() does not persist. If no thread is currently waiting on the monitor when notify() is called, the signal is lost.
This means if a thread calls wait() after a notify() has already occurred, it will block forever, akin to how a patient waiting to see a doctor in a hospital missed hearing their name (e.g: was in the restroom) being called by a nurse and ended up waiting indefinitely.
Recap: Java Monitors and Intrinsic Synchronization
In Java, a monitor is a high-level concurrency construct that provides both mutual exclusion and condition synchronization. Java monitors are implemented as an intrinsic part of every object in the Java Virtual Machine (JVM), meaning that every object implicitly supports monitor-based coordination.
Mutex
From the lecture notes, recall that Java achieves mutual exclusion through the use of the synchronized keyword. When a thread enters a synchronized block or method, it must acquire the monitor associated with the target object or class.
- For instance methods, the monitor is associated with the instance (
this). - For static methods, the monitor is associated with the class object (
ClassName.class). - For
synchronized(obj)blocks, the monitor is associated with the specific objectobj.
Only one thread may hold a given monitor at a time. All other threads attempting to enter a synchronized region guarded by that monitor are blocked until the monitor is released.
Condition Synchronization
Java monitors also support condition synchronization through the methods wait(), notify(), and notifyAll(): all of which must be called while holding the monitor (i.e., within a synchronized block or method).
wait()causes the current thread to release the monitor and suspend execution until another thread invokesnotify()ornotifyAll()on the same object.notify()wakes up one thread waiting on that monitor.notifyAll()wakes up all threads waiting on that monitor.
The typical pattern for condition synchronization involves a shared predicate variable and a while loop guarding a wait() call:
synchronized (lock) {
while (!condition) {
lock.wait();
}
// Proceed when condition is true
}
This usage ensures correctness in the presence of spurious wakeups, where a thread may return from wait() even if it was not explicitly notified.
It has the following key properties:
- A thread must hold the monitor before calling
wait(),notify(), ornotifyAll(). Otherwise, ajava.lang.IllegalMonitorStateExceptionis thrown. - The monitor’s condition queue is shared for all waiting threads.
notify()does not distinguish which thread to wake; it may wake a thread that cannot proceed, leading to inefficiencies or stalling unlessnotifyAll()is used appropriately. - Unlike semaphores,
notify()does not persist. If no thread is waiting whennotify()is called, the signal is lost.
While Java monitors provide a simple and safe mechanism for concurrency control, they are limited to a single condition queue per object. For more advanced control (e.g., multiple condition queues, fine-grained control), Java provides the java.util.concurrent.locks.Condition interface in conjunction with ReentrantLock. With ReentrantLock, you can create multiple conditions and call await() on each condition accordingly.
Scenario
The following class models a one-shot event between a producer and a consumer. The producer sets a flag and calls notify() to wake the consumer.
class OneShotEvent {
private boolean ready = false;
private final Object lock = new Object();
public void produce() {
System.out.println("Producer's running")
synchronized (lock) {
ready = true;
lock.notify(); // signal consumer
}
}
public void consume() {
System.out.println("Consumer's running")
while (!ready){
synchronized(lock){
lock.wait(); // wait for signal
}
}
System.out.println("Consumed");
}
}
This test is run:
OneShotEvent event = new OneShotEvent();
new Thread(() -> {
try {
event.consume();
} catch (InterruptedException e) {}
}).start();
System.out.println("Producer Begins")
event.produce();
Observation: Sometimes the program hangs and the message "Consumed" is never printed.
Answer the following questions:
- Why does the
consume()method sometimes block forever? - What happens if
produce()callsnotify()beforeconsume()reacheswait()? - How does this differ from a semaphore-based approach?
- Modify the code minimally so that no missed signal occurs, using only Java synchronization.
Hints:
notify()only works if a thread is already waiting.- Always use
while, notif, withwait().- Semaphores store permits, condition variables do not.
The consume() method may block forever because it checks ready, sees it is false, and calls wait(). But if the produce() method is in the middle of execution and was about to set the ready flag, that signal is lost as the consumer was not waiting yet. The consumer then goes to **sleep** with no one left to wake it up.
So in this scenario: a **race condition** that occur on the `ready` flag, interleaved with producer's produce(): consumer checks for `ready` and it's falls, then producer sets `ready` to true and calls notify(), then switched back to consumer that now enters wait(). The `signal` does not get stored or queued. The monitor simply ignores it if no threads are waiting. In short, when consumer does call wait(), it sleeps forever because the one chance to wake it was already missed.
Semaphores behave differently. If a thread calls release() (or signal()) before another thread calls acquire() (or wait()), the signal is **saved** by incrementing a counter. When another thread eventually calls acquire(), it will proceed immediately. This persistent state prevents missed signals.
4. The minimal fix is to protect the entire code inside a `syncrhonized` method. This ensures that there's no race condition with the flag `ready`. When `notify()` is called, it will wake up a consumer thread **or** prevent a consumer thread from waiting using `ready` flag.
public synchronized void consume() {
System.out.println("Consumer's running")
while (!ready)
lock.wait();
System.out.println("Consumed");
}
This guarantees correctness even if notify() is called before wait(), because the condition ready == true will skip the wait. The while also handles spurious wakeups correctly.
Can This Bounded Buffer Deadlock?
Background
A classic bounded buffer allows multiple producers and consumers to share access to a fixed-size queue. In this Java implementation, threads use wait() and notify() to coordinate access.
Important properties:
wait()suspends the current thread until it is notified.notify()wakes one thread waiting on the same monitor.- All threads synchronize on a single shared
lockobject. - There is no explicit condition variable: all threads wait on the same monitor.
Scenario
The following implementation runs with multiple producer and consumer threads:
class BoundedBuffer {
private final Queue<Integer> buffer = new LinkedList<>();
private final int CAPACITY = 5;
private final Object lock = new Object();
public void produce(int item) throws InterruptedException {
synchronized (lock) {
while (buffer.size() == CAPACITY)
lock.wait();
buffer.add(item);
lock.notify(); // wake up one thread
}
}
public int consume() throws InterruptedException {
synchronized (lock) {
while (buffer.isEmpty())
lock.wait();
int item = buffer.remove();
lock.notify(); // wake up one thread
return item;
}
}
}
At first glance, using notify() (not notifyAll()) seems risky: it wakes an arbitrary thread, even if that thread can’t make progress. What if producer mistakenly wake up another producer thread instead of a consumer thread?
Answer the following question: Is it possible for this program to enter a deadlock where no thread makes progress, despite threads being alive and correctly synchronized?
To make a clear answer, either:
- Provide a concrete example of a buffer state and thread state that causes deadlock, or
- Give a convincing proof that no such deadlock is possible, explaining why progress is always guaranteed.
Hint:
- What condition causes a thread to block?
- Who can unblock it?
- Can
notify()ever wake the “wrong” thread?- Does that matter if only one kind of thread is waiting at a time?
No, this program cannot deadlock.
Proof by invariant and exclusion:
- A producer only blocks if the buffer is full (size == CAPACITY).
- A consumer only blocks if the buffer is empty (size == 0).
- Therefore, both types of threads cannot be blocked at the same time, the buffer cannot be both full and empty.
- When a consumer removes an item, it calls
notify(). Since at that point, only producers can be waiting (because buffer was full), thenotify()wakes one producer, which can now proceed (buffer has space). - Likewise, when a producer adds an item and calls
notify(), only consumers may be waiting (buffer was empty), and the consumer can now proceed.
Thus, even though notify() wakes an arbitrary thread, the only threads that will be waiting are those that can make progress once notified.
Therefore, no combination of buffer state and thread state leads to deadlock. The system always makes progress, and deadlock is impossible under this design.
Circular Wait in Print Spooler and Scanner
Background
Deadlock is a state where a group of processes is unable to proceed because each is waiting for a resource held by another. Four conditions we learned in class (mutex, circular wait, no-preemption, hold-and-wait) must hold simultaneously for a deadlock to occur. If all four conditions are present, the system can reach a deadlocked state.
As stated previously, these are formally known as the Coffman conditions.
Scenario
A user launches two applications at the same time:
- App A locks the scanner first, then tries to lock the printer.
- App B locks the printer first, then tries to lock the scanner.
Each device is protected by a mutex. Sometimes, both applications stop responding and remain blocked forever.
The system has only one printer and one scanner. The simplified pseudocode for both apps is shown below.
// App A
lock(scanner);
sleep(1); // simulate time gap
lock(printer);
... // scan and print
unlock(printer);
unlock(scanner);
// App B
lock(printer);
sleep(1); // simulate time gap
lock(scanner);
... // print and scan
unlock(scanner);
unlock(printer);
Answer the following questions:
- Identify how each of the Coffman conditions is satisfied in this system.
- Provide a step-by-step explanation of how the two applications could enter a deadlock.
- Suggest two alternative designs that could prevent this deadlock and explain why they work.
- Suppose the printer driver is updated to include a log message before allowing access, which adds a short delay. How could this change affect the likelihood of deadlock?
Hints:
- Consider how timing affects the acquisition order.
- Draw a resource allocation graph if needed.
- Use the Coffman conditions to reason through both cause and prevention.
All four Coffman conditions are satisfied:
- Mutual exclusion: The printer and scanner are mutex-protected, so only one application can hold each at a time.
- Hold and wait: App A holds the scanner and waits for the printer. App B holds the printer and waits for the scanner.
- No preemption: Once an app holds a device, it will not release it unless it finishes its task. The OS does not forcibly take resources away.
- Circular wait: App A is waiting for the printer held by App B, and App B is waiting for the scanner held by App A. This forms a cycle.
Deadlock sequence:
- App A locks the scanner.
- App B locks the printer.
- App A attempts to lock the printer but is blocked since App B holds it.
- App B attempts to lock the scanner but is blocked since App A holds it.
- Neither app can proceed. A deadlock occurs.
Two alternative designs:
- Global resource ordering: Require all applications to acquire resources in a fixed order. For example, always lock the printer before locking the scanner. This prevents circular wait.
- Try-lock and backoff: Use a non-blocking attempt to lock the second device. If the second lock fails, release the first and retry later after sleeping. This prevents hold and wait.
If the printer driver introduces a delay due to logging, App B may take longer to acquire the printer. During that delay, App A is more likely to acquire the scanner and reach the point of attempting to acquire the printer. This increases the window in which both applications hold one device each and wait for the other, raising the chance of deadlock.
Banker’s Algorithm: Approve or Deny?
Background
In operating systems, Banker’s Algorithm is used to avoid deadlocks by checking whether a resource request will leave the system in a safe state. A safe state is one in which all processes can finish in some order, even if they do not finish immediately.
The algorithm works with four matrices or vectors:
- Available — the number of free instances of each resource.
- Max — the maximum demand each process may eventually request.
- Allocation — the number of resources currently held by each process.
- Need — the remaining resources needed, calculated as
Max - Allocation.
Before granting a request, the system simulates the allocation and checks whether a safe sequence of completion exists for all processes. If so, the request is granted. If not, it is denied to avoid the risk of entering an unsafe state that could lead to deadlock.
Scenario
A system has three resource types: A, B, and C. The total number of instances for each resource is:
- A: 10
- B: 5
- C: 7
There are five processes (P0 to P4). The current state of the system is as follows:
Allocation Matrix
| Process | A | B | C |
|---|---|---|---|
| P0 | 0 | 1 | 0 |
| P1 | 2 | 0 | 0 |
| P2 | 3 | 0 | 2 |
| P3 | 2 | 1 | 1 |
| P4 | 0 | 0 | 2 |
Max Matrix
| Process | A | B | C |
|---|---|---|---|
| P0 | 7 | 5 | 3 |
| P1 | 3 | 2 | 2 |
| P2 | 9 | 0 | 2 |
| P3 | 2 | 2 | 2 |
| P4 | 4 | 3 | 3 |
The Available vector is:
- A: 3
- B: 3
- C: 2
Now, process P1 makes a request for resources: (1, 0, 2).
Answer the following questions:
- Compute the Need matrix for each process.
- Should the system grant P1’s request? Show your reasoning using the Banker’s safety check.
- If the request is granted and P1 finishes and releases all its resources, what will the new Available vector be?
- Explain why entering an unsafe state does not immediately cause deadlock but is still dangerous.
Hints:
- A safe state guarantees at least one execution order where all processes can finish.
- An unsafe state does not guarantee deadlock but makes it possible.
- Holding resources without a guaranteed finish path creates future risk.
- The number of requested units doesn’t determine safety. The global state does.
Need matrix is computed as Max - Allocation:
| Process | A | B | C |
|---|---|---|---|
| P0 | 7 | 4 | 3 |
| P1 | 1 | 2 | 2 |
| P2 | 6 | 0 | 0 |
| P3 | 0 | 1 | 1 |
| P4 | 4 | 3 | 1 |
First check if P1's request is valid:
- Request ≤ Need: (1 ≤ 1, 0 ≤ 2, 2 ≤ 2) — valid
- Request ≤ Available: (1 ≤ 3, 0 ≤ 3, 2 ≤ 2) — valid
Simulate granting the request:
- New Available: (3 - 1, 3 - 0, 2 - 2) = (2, 3, 0)
- New Allocation for P1: (2 + 1, 0 + 0, 0 + 2) = (3, 0, 2)
- New Need for P1: (1 - 1, 2 - 0, 2 - 2) = (0, 2, 0)
Now check for a **safe** sequence:
- P3: Need (0, 1, 1) - **cannot** proceed, needs 1 unit of C but C = 0
- P1: Need (0, 2, 0) - fits, gets resources and finishes
- **Updated** Available: (2 + 3, 3 + 0, 0 + 2) = (5, 3, 2)
- P3: Now has enough, finishes and adds (2, 1, 1) → (7, 4, 3)
- P0: Need (7, 4, 3) - fits, finishes → Available becomes (7, 5, 3)
- P2: Need (6, 0, 0) - fits, finishes → (10, 5, 5)
- P4: Need (4, 3, 1) - fits, finishes → all processes done
The **safe** sequence is therefore: P1, P3, P0, P2, P4.
Conclusion: Yes, the system remains in a safe state. The request should be granted.
If P1 finishes, it releases (3, 0, 2), so Available becomes:
(2 + 3, 3 + 0, 0 + 2) = (5, 3, 2)
Entering an unsafe state means the system cannot guarantee that all processes will finish. A deadlock may not happen immediately, but if future requests are made and the wrong process proceeds, the system may become stuck with no way to satisfy some processes. Banker's Algorithm avoids this by rejecting requests that lead to this uncertainty.
The Banker’s Mistake
Background
As you’ve done in the lab, the Banker’s Algorithm is used to avoid deadlock by simulating allocations and only approving those that leave the system in a safe state: a state where all processes can eventually finish. A mistake in the algorithm’s logic can admit requests that appear harmless but eventually trap the system in a deadlock.
Scenario
A system is managing three types of resources (A, B, C) and four running processes. To optimize speed, a developer modifies the safety check to only verify if at least one process can finish after each allocation. The system continues to run, but under a specific sequence of requests, all processes become blocked and hold some resources. The Banker’s Algorithm did not catch this unsafe path because it didn’t simulate all possible finishing orders.
Answer the following questions
- What is the purpose of simulating the safety check in the Banker’s Algorithm?
- Why is it incorrect to only check if one process can finish when evaluating safety?
- Give a small example (2–3 processes, 2–3 resources) where granting a request appears safe at first glance but results in an unsafe state.
- How can the Banker’s Algorithm be modified to correctly detect unsafe allocations?
Hints:
- A safe state guarantees all processes can eventually finish.
- Just one process finishing doesn’t ensure overall safety.
- The algorithm simulates a possible sequence where every process can finish in some order.
- You must evaluate the system state after the hypothetical allocation before committing it.
The Banker's Algorithm simulates whether granting a resource request would leave the system in a safe state; meaning there exists at least one sequence of process completions where every process can finish. If no such sequence exists, the request is denied to avoid entering an unsafe (potentially deadlocked) state.
Just because one process can finish does not mean the remaining system will remain safe. It may be that only that process can finish, and once it releases resources, the rest are still stuck, leading to an unsafe or deadlocked state.
Suppose we have:
- Resources available: A: 3, B: 2
- P1 – Max: A: 2 B:2, Allocated: A: 1 B:0 → Needs: A:1 B:2
- P2 – Max: A: 1 B:1, Allocated: A: 1 B:1 → Needs: A:0 B:0
- P3 – Max: A: 3 B:1, Allocated: A: 0 B:0 → Needs: A:3 B:1
- P1 still needs A:1 B:2 (unavailable)
- P3 still needs A:2 B:0 (unavailable)
The Banker's Algorithm must simulate the *full* system:
- Start from the available vector after the hypothetical allocation.
- Find a process that can finish given current availability.
- Release its resources and repeat until all processes finish.
The Unsafe Shortcut
Background
Deadlock avoidance techniques completely disallow the system from entering states where deadlock could happen. The Banker’s Algorithm we learned in class repeatedly checks whether a resource request leaves the system in a “safe state”. If it doesn’t, it will reject that request. The process whose request is rejected couldn’t progress and has to wait and try to request again some time in the future: it might be granted in the future after other processes have released their resources.
Safe state: a state where all processes can eventually finish.
Scenario
A system uses the Banker’s Algorithm to approve resource requests. To optimize performance under load, a developer modifies the algorithm to skip the safe-state check for requests that appear “small” (e.g., requesting only one unit). At first, the system continues to run fine. But under heavy load, it freezes entirely. Post-mortem analysis shows multiple unfinished processes holding resources and waiting indefinitely.
Example Suppose the system has 2 identical units of a resource and 3 processes:
- P1 may request up to 2
- P2 may request up to 2
- P3 may request up to 1
The current allocation is:
- P1 has 0
- P2 has 1
- P3 has 0
Suppose P1 now requests 1 of the resources. Granting it would leave 0 free units. This leads to an unsafe state: P1 still needs 1, P2 still needs 1, and P3 still needs 1, but not yet deadlocked (as each process may request up to n resources, not fully maxed out at a time).
Let’s push the scenario further: if P3 asked for the resource, it will have to wait because no more resource is available, but the system is also not yet deadlocked. There’s still a possibility where P2 might eventually release the resource, allowing P3 to proceed.
However, if all processes: P1, P2, and P3 request for 1 more instance of the resource to proceed. Then, the system will be deadlocked.
Answer the following questions
- What is the difference between an unsafe state and a deadlocked state?
- Explain how entering an unsafe state can eventually lead to deadlock.
- In the scenario above, why is skipping the safety check dangerous even if the request seems small?
- Suppose the system grants a request and enters an unsafe state. Describe one possible sequence of events that leads to deadlock.
- Suggest one modification to improve performance without removing the safety check.
Hints:
- A safe state guarantees at least one execution order where all processes can finish.
- An unsafe state does not guarantee deadlock but makes it possible.
- Holding resources without a guaranteed finish path creates future risk.
- The number of requested units doesn’t determine safety. The global state does.
An unsafe state means that the system cannot guarantee that all processes can complete; however, it may still be possible to avoid deadlock through careful scheduling. A deadlocked state means that a set of processes are waiting on each other in a cycle and none can proceed.
If the system enters an unsafe state and future resource requests do not arrive in a favorable order, it can lead to a situation where some processes hold resources and wait indefinitely, completing the conditions for deadlock.
Even small requests can cause the system to enter an unsafe state. The Banker's Algorithm considers the **entire** system state, not just the size of an individual request. Skipping the check removes the guarantee of safety.
Suppose Process 1 is granted a request without a safety check. The system enters an **unsafe state**. Later, when all processes request for 1 more instance of the resource, it forms a wait cycle and no process can finish. At this point, a deadlock occurs.
One approach is to cache safe-state results for common request patterns or to *parallelize* the safety check itself. Another strategy is to batch requests and analyze them in bulk while still performing safety checks before granting. We can also try to use efficient data structure to speed up the checks. You should search for these online (research papers) if you are interested.
Hidden Cycles in Resource Allocation Graph
Background
A Resource Allocation Graph (RAG) is a directed graph used to visualize how processes and resources interact in a system. It consists of:
- Processes (circles)
- Resources (squares)
- Request edges from a process to a resource
- Assignment edges from a resource to a process
In a system where each resource has exactly one instance, a cycle in the graph implies a deadlock. However, if a resource has multiple instances, a cycle does not necessarily mean deadlock.
The graph must be analyzed more carefully to distinguish between true deadlocks and safe but cyclic states.
Scenario
You are given the following snapshot of a system. It includes three processes (P1, P2, P3) and two resource types:
- R1 has 2 instances
- R2 has 1 instance
Current graph state:
- P1 holds 1 instance of R1 and is requesting R2
- P2 holds R2 and is requesting 1 instance of R1
- P3 holds 1 instance of R1 and is not requesting anything
Graphically, this forms a cycle:
- P1 → R2 → P2 → R1 → P1
Note that R1 has 2 instances, and one is held by P3.
Answer the following questions:
- Draw the resource allocation graph based on the description. Label request and assignment edges clearly.
- Does this graph represent a deadlock? Justify your answer using resource instance counts.
- What is the key difference in reasoning when resources have multiple instances compared to when each has only one?
- How would adding another instance of R2 affect the potential for deadlock in this graph?
Hints:
- A cycle in a resource allocation graph is only sufficient to prove deadlock when all resources have one instance.
- If a resource has multiple instances, you must check whether the processes can eventually proceed.
- Track how many units are held and whether a process’s request can be fulfilled with the remaining instances.
- Just because a cycle exists does not mean the system is stuck.
The resource allocation graph has the following structure:
- P1 holds 1 instance of R1 → R1 has an assignment edge to P1
- P1 is requesting R2 → request edge from P1 to R2
- P2 holds R2 → R2 has an assignment edge to P2
- P2 is requesting R1 → request edge from P2 to R1
- P3 holds 1 instance of R1 → R1 has an assignment edge to P3
This forms a cycle: P1 → R2 → P2 → R1 → P1
This graph does not represent a deadlock. Although a cycle exists, R1 has two instances. One is held by P1 and one is held by P3. P2 is requesting one instance of R1. If P3 releases its R1 instance, then P2 can proceed, finish, and release R2, allowing P1 to continue. Therefore, progress is still possible, and the system is not deadlocked.
When each resource has only one instance, any cycle in the graph means a deadlock. With multiple instances, a cycle is not sufficient. You must analyze whether resource demands can be satisfied. The system may still be able to progress if at least one process can complete and release its resources.
If R2 had one more instance, then the request by P1 for R2 could be satisfied immediately. P1 would proceed, finish, and release R1. This would allow P2’s request for R1 to be granted next. Adding another instance of R2 therefore reduces the risk of deadlock and may eliminate the cycle altogether depending on timing.
Dining Savages with Broken Pot Semaphore
Background
The Dining Savages Problem is a classic concurrency scenario involving a group of threads (savages) sharing a common pot of food. A cook thread refills the pot when it is empty. To coordinate correctly, synchronization primitives such as mutexes and semaphores are used.
Each savage must:
- Acquire a lock to check the pot.
- If food is available, take one serving.
- If the pot is empty, signal the cook to refill it.
- Wait until food becomes available again.
If the synchronization is incorrect; for example, if a semaphore is missing or misused then the system can enter a deadlock where savages wait indefinitely and the cook is never notified.
Scenario
Consider the following buggy implementation:
semaphore serving_available = 0;
semaphore empty = 1; // used to wake up cook
mutex mtx = 1; // used by savages to protect servings_eaten
int servings_eaten = 0; // shared resource among savages
// savage code
while (true) {
wait(serving_available);
eat();
wait(mtx);
servings_eaten++;
if (servings_eaten == N) {
servings_eaten = 0;
signal(empty);
}
signal(mtx);
}
// cook code
while (true) {
wait(empty);
cook();
signal(serving_available);
}
However, after some time, the program deadlocks. All savage threads are blocked, and the cook is idle.
Answer the following questions:
- Explain the purpose of each semaphore and how they coordinate between the savages and the cook.
- Describe the condition (scenario) that leads the system into a deadlock.
- Why is it incorrect to simply call
signal(serving_available)once? - Modify the synchronization so that deadlock is mitigated. The modification should be as minimal as possible.
Hints:
- Only one savage should signal the cook when the pot is empty.
- Semaphores do not queue extra signals if no one is waiting.
- The cook only wakes one savage after refilling and the others remain blocked with the current implementation.
- Think about whether
serving_availableshould count the number of available servings.
The empty semaphore is used by savages to notify the cook when the pot is empty. The full semaphore is used by the cook to signal back to the waiting savage that the pot has been refilled.
The deadlock occurs because only one savage is woken after the pot is refilled. That savage proceeds and takes one serving, but no other savage is signaled. If that savage consumes the only serving_available signal and more savages find the pot empty again, they each signal empty, but the cook is already asleep. Since semaphores do not count signals when no thread is waiting, the cook remains idle and all savages are blocked.
It is incorrect to call signal(serving_available) only once because there are multiple savages. Semaphores are counters. If only one full signal is given, only one savage can proceed. The others will block indefinitely on wait(serving_available).
To fix this, full should represent the number of servings in the pot. The cook should signal(serving_available) N times after refilling. Each savage then wait(serving_available) before taking a serving. This ensures that N servings can be consumed by N savages, one per signal. Also, only one savage should be allowed to signal empty to prevent duplicate cook notifications. This can be done with an additional mtx semaphore to indicate that a refill is already in progress.
Epilogue
The above solution to the dining savages problem works, but it requires you to signal many times as the semaphore servings_available represents the number of servings available for each savage. Below is an alternative solution that uses int servings variable instead of using the semaphore to count the servings. Either solution works.
// Shared variables
int servings = 0;
mutex pot_mutex;
semaphore empty = 0; // used to wake up cook
semaphore full = 0; // used to wake up savages
// Savage thread
while (true) {
wait(pot_mutex);
if (servings == 0) {
signal(empty); // notify cook
wait(full); // wait for refill
}
servings--;
signal(pot_mutex);
eat();
}
// Cook thread
while (true) {
wait(empty); // wait until pot is empty
cook();
servings = N; // refill pot
signal(full); // notify savage
}
Preemption and Priority Inversion in Lock Acquisition
Background
In preemptive operating systems with priority scheduling, a high-priority process can interrupt a low-priority one to ensure timely execution. However, if a low-priority thread holds a lock needed by a high-priority thread, and medium-priority threads keep preempting the low-priority one, the high-priority thread gets blocked. This scenario is called priority inversion.
Priority inversion violates scheduling expectations. It may not cause a classical deadlock, but it leads to indefinite blocking of higher-priority threads. In real-time systems, this can cause serious issues. Some systems implement priority inheritance to solve the problem.
Scenario
Three threads are running with the following priorities:
- Low-priority T1 holds a lock
Land is in its critical section. - High-priority T2 tries to acquire
Land is blocked. - Medium-priority T3 does not need
Lbut frequently runs and preempts T1.
Because T1 never gets CPU time, it cannot release the lock. T2 remains blocked even though it has higher priority. This behavior is observed in some real-time systems like Mars Pathfinder.
Answer the following questions:
- Why does T2 not proceed, even though it has higher priority than T1 and T3?
- Does this situation meet the four Coffman conditions for deadlock? Why or why not?
- How does priority inheritance help resolve this issue?
- Suppose priority inheritance is not available. Suggest an alternate way to prevent such inversion scenarios.
Hints:
- Deadlock requires circular wait. Is that happening here?
- T1 is not waiting for a resource, but still blocks T2 indirectly.
- Inheritance temporarily boosts T1’s priority to match T2’s.
- Consider how resource access policies can be redesigned to avoid this.
T2 cannot proceed because it is blocked waiting for lock L, which is held by T1. T1 is unable to run because it has the lowest priority and gets preempted by T3. Although T2 has the highest priority, it depends on T1 to release the lock, and T1 never gets CPU time to do so.
This situation does not satisfy all Coffman conditions. Specifically:
- Mutual exclusion: The lock is non-sharable (satisfied)
- Hold and wait: T2 is waiting for the lock (satisfied)
- No preemption: Locks are only released voluntarily (satisfied)
- Circular wait: Not present. T1 is not waiting for anything. Therefore, this is not a classical deadlock, but it is a form of indefinite blocking.
Priority inheritance allows T1 to **temporarily** **inherit** the higher priority of T2. This ensures that T1 will get CPU time and release the lock quickly. Once it does, T2 can proceed, and T1 reverts to its original priority. This eliminates the priority inversion.
If priority inheritance is unavailable, an alternative is to use a **priority ceiling protocol**, where any thread acquiring a lock temporarily runs at the highest priority of any thread that may need it. Another option is to design systems such that low-priority threads do not hold locks required by high-priority ones, or to avoid holding locks for extended periods. Using non-blocking data structures or message-passing models may also help avoid this situation entirely.
The Ostrich Algorithm
Background
A deadlock prevention strategy often taught in operating systems is the Ostrich Algorithm, which simply ignores the problem (what a wonderful strategy!). The idea is that if deadlocks are rare, it may not be worth the overhead of avoiding or detecting them. This approach is named after the ostrich’s supposed habit of “burying its head in the sand” when facing danger.
In practice, many general-purpose operating systems adopt this strategy for certain types of locks or resources. The assumption is that users or programs will avoid mistakes, or that occasional restarts are acceptable.
However, ignoring deadlocks is only safe when the cost of failure is low and the system can recover gracefully. In long-running systems or mission-critical applications, even a rare deadlock can be catastrophic.
Scenario
A file server uses a multi-threaded model where threads acquire read and write locks on files. Occasionally, two threads acquire locks in different orders:
- Thread A locks File X and then requests File Y.
- Thread B locks File Y and then requests File X.
The system does not enforce lock ordering and does not use any deadlock detection. After a long uptime, the server becomes unresponsive. Investigation reveals that Thread A and Thread B are both blocked, each waiting on the other’s lock.
The server does not crash but stops processing requests. This problem only happens once every few weeks.
Answer the following questions:
- Why is the Ostrich Algorithm sometimes chosen as a design strategy in operating systems?
- What are the risks of using the Ostrich Algorithm in the file server scenario described?
- Suggest one runtime strategy and one design-time strategy that could help reduce the likelihood of such deadlocks.
- In what types of systems is the Ostrich Algorithm a reasonable tradeoff, and when is it irresponsible?
Hints:
- Think about the cost of prevention versus the cost of failure.
- Is the system interactive, recoverable, or mission-critical?
- Not all deadlocks are equally harmful. Some are tolerable, others are fatal.
- Runtime fixes involve detection or recovery, while design-time fixes involve resource usage rules.
The Ostrich Algorithm is chosen when the probability of deadlock is low and the cost of preventing it is high. It avoids the complexity and overhead of prevention or detection mechanisms. This is common in systems where restarts are acceptable, such as desktop applications or non-critical services.
In the file server scenario, ignoring deadlock leads to a full system halt. Since threads can block each other indefinitely, the server becomes unresponsive without crashing. This is dangerous for a service expected to run continuously, as recovery requires manual intervention or automated restarts, which can lead to data inconsistency or service downtime.
Here's one runtime strategy suggestion:
- Runtime strategy: Implement a watchdog timer or deadlock detector that checks for threads blocked beyond a timeout and kills or resets them.
- Design-time strategy: Enforce a strict lock ordering policy where all threads must acquire resources in a predefined sequence, such as by file ID order. This eliminates circular wait.
The Ostrich Algorithm is reasonable in systems where failure is rare, recovery is easy, and data is not critical. For example, user interfaces or non-essential background processes. It is irresponsible in real-time systems, financial systems, or infrastructure services where reliability, uptime, and consistency are essential. In such systems, even rare deadlocks are unacceptable.
The Waiting Ring
Background
One of the four necessary conditions for deadlock is circular wait: a set of processes each waiting for a resource held by the next. When this occurs and no process can proceed, the system enters a deadlocked state.
Scenario
A messaging server uses five worker threads (T0 to T4) to handle tasks requiring two locks: one for input and one for output buffers. Due to legacy design, each thread acquires the input lock for its assigned buffer, processes some data, and then requests the output lock of the next thread in sequence.
Under certain timing conditions, all five threads hold their input locks and are blocked waiting for the output lock held by the next thread. The system halts with no progress.
Answer the following questions
- Which deadlock condition(s) are clearly satisfied in this scenario?
- Draw the resource allocation graph involving the five threads and the two types of locks.
- How do we know this situation is a deadlock, and not merely contention?
- Contention in computing refers to a situation where multiple processes, threads, or devices compete for the same shared resource, such as a CPU, memory, disk, or lock.
- Describe a strategy to prevent this deadlock using lock acquisition ordering.
Hints:
- Always remember that deadlock requires four conditions to hold simultaneously.
- A wait-for graph shows who is waiting on whom.
- A cycle in the wait-for graph implies deadlock.
- Lock ordering is a common prevention strategy.
The system satisfies all four necessary conditions for deadlock:
- Mutual exclusion: Locks are held exclusively by one thread.
- Hold and wait: Each thread holds an input lock while requesting an output lock.
- No preemption: Locks are not forcibly taken away.
- Circular wait: T0 waits on T1, T1 on T2, ..., T4 on T0, forming a cycle.
Each thread Ti holds Lock Li (input) and waits for Lock L(i+1 mod 5) (output). The graph is a directed cycle:
- T0 → T1
- T1 → T2
- T2 → T3
- T3 → T4
- T4 → T0
Contention *becomes* deadlock when there is no possibility for any thread to proceed. In this case, each thread is waiting for a resource held by another, and none can make progress, which defines deadlock. The presence of a cycle in the wait-for graph confirms this.
To prevent deadlock, enforce a global lock acquisition order. For example, assign a consistent numeric ordering to all locks and require threads to always acquire locks in increasing order. If all threads acquire input and output locks in that global order, circular wait is impossible.
The Greedy Request
Background
Deadlock can occur when processes hold resources while waiting for others. This is the hold and wait condition. Systems that allow incremental resource acquisition without constraints are particularly vulnerable under high contention.
Scenario
A simulation engine uses thread pools to run batches of physics computations. Each thread requests resources for memory buffers, GPU time, and disk access but requests them one by one, as needed.
To improve throughput, the engine starts aggressively launching more threads. Each thread acquires whatever resource it needs immediately and continues execution. Under pressure, threads begin holding onto one resource while waiting for another. Eventually, the system locks up completely.
Answer the following questions
- Which of the four necessary deadlock conditions are present in this scenario?
- Why does allowing threads to acquire resources incrementally make the system more prone to deadlock?
- Propose a method to eliminate the hold-and-wait condition. What are the tradeoffs?
- Suppose the system cannot eliminate hold-and-wait. What other mitigation options are available?
Hints:
- Deadlock arises from mutual exclusion, hold and wait, no preemption, and circular wait.
- Acquiring resources one by one creates dependency chains.
- Forcing threads to request all resources upfront eliminates hold-and-wait.
- Timeout, ordering, or rollback may help reduce risk.
This system satisfies:
- Mutual exclusion: Resources like GPU and disk cannot be shared.
- Hold and wait: Threads hold resources while requesting more.
- No preemption: Resources are only released voluntarily.
- Circular wait: With enough threads, cycles of dependency can form.
When threads request resources one at a time, they may end up waiting for resources held by others who are also waiting. This forms chains of dependencies, which can close into cycles if not controlled.
A common method is to require all resources to be requested at once. If any resource is unavailable, the thread releases all it has and retries. This prevents hold-and-wait entirely.
The tradeoff is reduced concurrency and potential starvation: threads may repeatedly fail to acquire all needed resources, even if some are free.
If hold-and-wait cannot be removed:
- Use lock ordering to prevent circular wait.
- Apply timeouts or request denial policies.
- Use deadlock detection and recover by killing or rolling back threads.
The Forgotten Detector
Background
Not all systems prevent deadlock. Some detect it after the fact and try to recover. This works well if detection runs frequently enough. But if detection is delayed or misconfigured, the system can enter a deadlocked state and remain frozen until manual intervention.
Scenario
A database engine manages read/write locks using a resource allocation graph. It relies on a background thread to detect cycles every 60 seconds.
During a high-load batch import, several transactions begin holding read locks while requesting write locks. A cycle forms among four transactions, but the detection thread is delayed due to CPU starvation. No queries complete for several minutes, and the monitoring system marks the service as unhealthy.
Answer the following questions
- Why does the system deadlock in this scenario even though detection is enabled?
- How does the delay in detection affect system reliability?
- Suppose the detection thread uses the following code. What flaw might cause it to miss cycles under load?
// simplified detector logic
while (1) {
sleep(60);
if (load_average() < 5.0) {
check_for_cycles(); // scans graph for wait cycles
}
}
- Propose two improvements to make deadlock detection more robust in this kind of system.
Hints:
- Deadlock detection requires timely and accurate cycle checking.
- Sleeping too long or skipping detection under high load makes it worse.
- A cycle in the wait-for graph means no process in the cycle can proceed.
- Starvation of the detector thread can delay resolution.
Detection only works if it runs frequently enough. In this case, a deadlock forms between transactions, but the detector thread is delayed or suppressed due to high CPU usage. While detection is configured, it is not timely, so the system remains deadlocked.
Delayed detection increases downtime and affects system availability. During this period, all transactions involved in the cycle are stuck. If the detector doesn’t run promptly, the system may appear unresponsive to users or monitoring tools.
The condition if (load_average() < 5.0) causes the detector to skip checks under high load, which is precisely when deadlocks are more likely to occur. This creates a blind spot in the system during peak usage, defeating the purpose of detection.
Two possible improvements:
- Run detection at fixed intervals regardless of load. Instead of checking load average, always perform the cycle detection every fixed time (e.g. every 10s).
- Use event-based triggers. Instead of polling every interval, detect when transactions block for unusually long durations and trigger a graph analysis immediately.
Deadlock in Bounded Buffer with Split Locks
Background
A deadlock occurs when threads acquire locks in a circular dependency, where each thread is holding a lock that another thread needs. This happens when:
- Two or more locks are used.
- Threads acquire the locks in different orders.
- There is no enforced lock acquisition protocol.
The safest way to avoid deadlocks is to impose a consistent global lock order, so all threads acquire multiple locks in the same sequence.
Scenario
The following implementation splits the synchronization responsibilities across two lock objects, intending to separate producer and consumer paths:
class BoundedBuffer {
private final Queue<Integer> buffer = new LinkedList<>();
private final int CAPACITY = 5;
private final Object producerLock = new Object();
private final Object consumerLock = new Object();
public void produce(int item) throws InterruptedException {
synchronized (producerLock) {
while (true) {
synchronized (consumerLock) {
if (buffer.size() < CAPACITY) {
buffer.add(item);
consumerLock.notify(); // wake a consumer
return;
}
}
producerLock.wait(); // wait until space available
}
}
}
public int consume() throws InterruptedException {
synchronized (consumerLock) {
while (true) {
synchronized (producerLock) {
if (!buffer.isEmpty()) {
int item = buffer.remove();
producerLock.notify(); // wake a producer
return item;
}
}
consumerLock.wait(); // wait until item available
}
}
}
}
This runs with multiple producer and consumer threads concurrently.
Answer the following questions:
- Can this program deadlock? If yes, describe a concrete interleaving and lock state that leads to a deadlock.
- Why does this happen, even though both
wait()andnotify()are used correctly? - What is a lock ordering protocol, and how does it prevent this deadlock?
- Modify the code minimally to implement a lock ordering protocol. Assume both
producerLockandconsumerLockmust still be used.
Hints:
- Focus on the order in which each method acquires the two locks.
- Consider always locking one before the other, regardless of role.
- You may refactor each method to acquire both locks together before any critical section.
Yes, the program can deadlock.Example interleaving:
- Producer thread enters
produce()and acquiresproducerLock. - At the same time, consumer thread enters
consume()and acquiresconsumerLock. - Producer tries to acquire
consumerLockbut it’s held by the consumer. - Consumer tries to acquire
producerLockbut it’s held by the producer.
Now each thread waits for the other to release a lock, resulting in a deadlock.
This happens because the locks are acquired in **opposite orders**:
Producers acquire producerLock → consumerLock,
Consumers acquire consumerLock → producerLock.
This creates the potential for circular wait.
A lock ordering protocol means enforcing that all threads always acquire locks in the same order.
For example, always lock consumerLock before producerLock (or vice versa) in both methods.
This prevents circular wait and guarantees deadlock freedom.
4. Minimal fix using a lock ordering protocol (always acquire consumerLock before producerLock):
class BoundedBuffer {
private final Queue buffer = new LinkedList<>();
private final int CAPACITY = 5;
private final Object producerLock = new Object();
private final Object consumerLock = new Object();
public void produce(int item) throws InterruptedException {
// Always acquire consumerLock before producerLock
while (true) {
synchronized (consumerLock) {
synchronized (producerLock) {
if (buffer.size() < CAPACITY) {
buffer.add(item);
consumerLock.notify(); // signal a waiting consumer
return;
}
}
// Only wait while holding consumerLock
consumerLock.wait(); // wait until consumer removes an item
}
}
}
public int consume() throws InterruptedException {
while (true) {
synchronized (consumerLock) {
synchronized (producerLock) {
if (!buffer.isEmpty()) {
int item = buffer.remove();
producerLock.notify(); // signal a waiting producer
return item;
}
}
// Only wait while holding consumerLock
consumerLock.wait(); // wait until producer adds an item
}
}
}
}
</code></pre>
This version:
- Always locks
consumerLock before producerLock.
- Avoids holding both locks during
wait().
- Eliminates circular wait: hence prevents deadlock.
Note that using two locks like this is inefficient, but the question is just made for exercise purposes.
</div>