 50.005 CSE
50.005 CSE
- Processes and Threads Synchronization
- The Race Condition
- The Critical Section Problem
- Software Mutex Algorithm
- Synchronization Hardware
- Software Spinlocks and Mutex Locks
- Semaphores
- Condition variables
- Final Note
- Summary
- Appendix
50.005 Computer System Engineering
Information Systems Technology and Design
Singapore University of Technology and Design
Natalie Agus (Summer 2025)
Processes and Threads Synchronization
Detailed Learning Objectives
- Explain the Producer-Consumer Problem
- Explain issues of multiprogramming and concurrency: the race condition
- Identify the challenges of managing two asynchronous processes or threads (producer and consumer) that interact through a shared bounded buffer.
- Distinguish between the terms “asynchronous,” “concurrent,” and “parallel” and their implications on process execution and scheduling.
- Identify real-life examples of producer-consumer scenarios such as a compiler and assembler interaction, and web servers and browsers.
- Explain the precedence constraints: the necessary conditions to prevent the producer from overfilling the buffer and the consumer from reading from an empty buffer.
- Explain Critical Section and Race Conditions
- Define the critical section where processes access shared resources that require mutual exclusion.
- Explain race conditions, particularly how they can disrupt program correctness in the context of shared variables like counters.
- Explain Various Synchronization Mechanisms
- Prove how various race condition solution supports mutual exclusion, progress, and bounded waiting
- Explore different synchronization techniques including software and hardware solutions, semaphores, and condition variables.
- Discuss how these solutions enforce mutual exclusion, manage process execution order (bounded waiting), and maintain progress and avoid starvation.
- Discuss how Peterson’s solution solve the critical section problem and prove its correctness.
- Summarize the difference between solutions requiring and not requiring to busy wait.
- Explain how semaphores function as counters for resource management, capable of solving complex synchronization problems beyond simple mutual exclusion with minimised busy waiting
- Explain how condition variables work with mutexes to provide a way for threads to wait for specific conditions to proceed, enabling efficient resource management without busy waiting.
- Evaluate the Efficiency and Applicability of Each Synchronization Mechanisms
- Assess when to use each type of synchronization technique based on the specific requirements and context of the problem, considering factors like system architecture, overhead, and the nature of the critical section.
- Explore Practical Implementations and Code Examples
- Examine C code samples that implement mutexes, condition variables, and semaphores to handle synchronization in multi-threaded environments.
These objectives guide through understanding the theoretical concepts and practical implementations, emphasizing the importance of correct synchronization in concurrent programming to maintain data integrity and program stability.
Background: Asynchrony vs Concurrency vs Parallelism
Asynchronous processing involves non-blocking tasks that run independently without waiting for others, concurrent processing manages multiple tasks making progress over time without simultaneous execution, while parallel processing executes multiple tasks at the same time on multiple cores or processors.
Asynchronous Processing
Asynchronous processing allows a program to perform tasks without waiting for others to complete. This is particularly useful in I/O operations where waiting for a resource could block other tasks. Instead, tasks can be started and the program can move on to other tasks while waiting for the initial tasks to complete.
Example: Making an HTTP request. The program can initiate the request and then continue executing other code. When the response is received, a callback function can be executed to handle the response.
Asynchrony does not necessarily require multi-threading.
Concurrent Processing
Concurrent processing involves multiple tasks making progress over time, but not necessarily simultaneously. This can be achieved through various methods like time slicing, where each task is given a small time slot to execute before moving to the next one. In order to achieve concurrency, there has to be overlapping management, suspension, coordination, or scheduling (need task switching or interleaving).
Example: Running multiple threads on a single-core processor. Each thread gets a time slice to run, and the operating system switches between them, creating the illusion of simultaneous execution.
Asynchrony enables concurrency, but does not guarantee it because in the code we can still
awaitto ensure one task runs after another, thus effectively disabling concurrency. Multithreading also enables concurrency but does not guarantee it because scheduler might just schedule these threads in sequence.However concurrency cannot happen without either asynchrony or multithreading.
Parallel Processing
Parallel processing involves performing multiple tasks simultaneously. This requires multiple processors or cores. Each core can execute a different task at the same time, leading to true simultaneous execution.
Example: Running multiple processes on a multi-core processor. Each process can run on a different core, truly executing in parallel.
Key Differences
- Execution Style:
- Asynchronous: Non-blocking, tasks are started and the program continues without waiting.
- Concurrent: Multiple tasks are in progress, but they may not be running at the exact same time.
- Parallel: Multiple tasks are executed simultaneously, requiring multiple cores or processors.
- Typical Use Cases:
- Asynchronous: I/O-bound tasks, such as reading/writing files, network requests.
- Concurrent: Multithreading in applications, such as GUI applications where you don’t want the interface to freeze while performing background tasks.
- Parallel: CPU-bound tasks, such as scientific calculations, data processing on large datasets.
- Hardware Requirements:
- Asynchronous: Does not necessarily require multiple cores or processors.
- Concurrent: Can be achieved with a single-core processor through time slicing.
- Parallel: Requires multiple cores or processors.
Summary
- Asynchronous processing allows tasks to be executed without blocking the main program flow, often used for I/O operations.
- Concurrent processing enables multiple tasks to make progress over time, often through multithreading or multiprocessing.
- Parallel processing executes multiple tasks simultaneously, requiring multi-core processors or multiple processors.
Each of these concepts can be implemented using different techniques and technologies depending on the specific requirements and constraints of the application. Understanding when and how to use each can significantly impact the performance and efficiency of software systems.
The Producer Consumer Problem
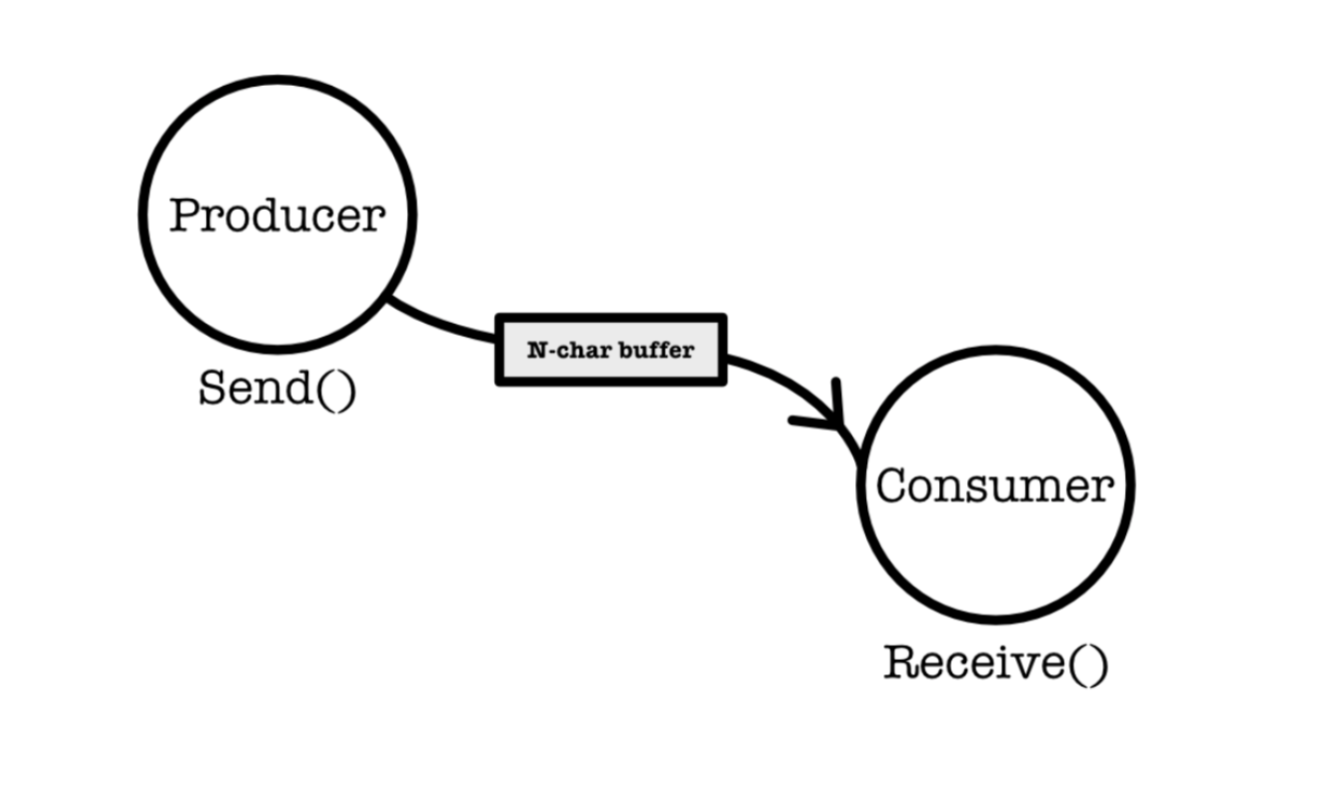
Consider the basic producer-consumer problem, where two asynchronous processes or threads are trying to write to and read from the same bounded N-character buffer concurrently.
Asynchronous and concurrent means that both processes or threads make progress, but we cannot assume anything about their relative speed of execution.
Confused about the term asynchronous or concurrent or parallel? Read this burger ordering analogy that was found by one of your CSD seniors.
Real Life Examples
In real life situations, a producer process produces information that is consumed by a consumer process. For example:
- A compiler (producer) producing assembly code that is consumed by an assembler (consumer).
- The assembler can also be a producer with respect to the loader: it produces object modules that are consumed by the loader.
- A web server produces (that is, provides) HTML files and images, which are consumed (that is, read) by the client web browser requesting the resource.
Precedence Constraints
We require the following precedence constraints for these asynchronous processes:
- Producer cannot produce too much before consumer consumes
- Consumer cannot consume before producer produces
What happens if there’s no synchronization?
To highlight what happens if we don’t synchronize both processes / threads, lets see a very simple producer program. Let counter and buffer of size N be a shared variable between the producer and consumer. counter keeps track of how many items there are in the buffer.
while (true) {
/* produce an item in next produced */
while (counter == BUFFERSIZE); /* do nothing */
buffer[in] = nextproduced;
in = (in + 1) % BUFFERSIZE;
counter++;
}
And the following very simple consumer program:
while (true) {
while (counter == 0); /* do nothing */
next consumed = buffer[out];
out = (out + 1) % BUFFERSIZE;
counter--;
/* consume the item in next consumed */
}
Each code is correct on its own, but incorrect when executed concurrently, meaning that without any proper synchronisation attempts, the precedence condition will be violated.
This is due to the presence of race condition.
The Race Condition
Assume buffer and counter are shared between the two processes / threads. The instructions counter ++ and counter -- are not implemented in a single clock cycle (it is not atomic).
Atomic Operation
Atomicity
An atomic operation is an indivisible operation that completes in a single step relative to other threads. It appears instantaneous and is executed without any interference from other operations, ensuring consistency and preventing race conditions.
Note that atomic operation does NOT necessarily mean it is non-interruptible. An atomic operation ensures that the operation is completed as a single, indivisible step with respect to other threads/processes, meaning that once the operation begins, it will complete without interference from other operations.
This guarantees consistency and prevents race conditions. However, remember that it does not imply that the operation cannot be interrupted at the hardware or operating system level; it means that from the perspective of other threads or processes, the operation appears to happen instantaneously and without interruption.
Non-atomic ++ and --
counter++ may be implemented as follows in assembly language:
LDR(counter, R2)
ADDC(R2, 1, R2) || or SUBC for counter--
ST(R2, counter)
This is non-atomic because it is composed of multiple separate instructions that are not executed as a single, indivisible operation. More precisely, each of these instructions can be interleaved by the execution of other threads, leading to inconsistencies (race condition) in the result.
Race Condition Outcome 1
The execution between counter ++ and counter -- can therefore be interleaved. For example in a uniprocessor system, when the value of counter is 4 and the producer is now writing the 5th item, it could get interrupted while executing counter++ for consumer to consume the 5th item and cause the following interleaved execution between the two:
LDR(counter, R2) | Producer executes, then interrupted, R2’s content:4
...IRQ on producer, save state, restore consumer
LDR(counter, R2) | Consumer executes, R2 contains 4
SUBC(R2, 1, R2) | R2 contains 3, then consumer is interrupted
...IRQ on consumer, save state, restore producer
ADDC(R2, 1, R2) | R2 contains 5
ST(R2, counter) | value 5 is stored at counter, then IRQ
...IRQ on producer, save state, restore consumer
ST(R2, counter) | value 3 is stored at counter
Therefore the final value of the counter is 3 when it should be 4.
Race Condition Outcome 2
We can try another combination of interleaved execution:
LDR(counter, R2) | Producer executes, then interrupted R2’s content:4
...IRQ on producer, save state, restore consumer
LDR(counter, R2) | Consumer executes, R2 contains 4
SUBC(R2, 1, R2) | R2 contains 3
ST(R2, counter) | value 3 is stored at counter, then consumer is interrupted
...IRQ on consumer, save state, restore producer
ADDC(R2, 1, R2) | R2 contains 5
ST(R2, counter) | value 5 is stored at counter
Therefore in the case above, the final value of the counter is 5 which is still incorrect.
Other Race Condition Outcomes
You may easily find that the value of the counter can be 4 as well through other combinations of interleaved execution of counter ++ and counter --.
Hence the value of the counter depends on the order of execution that is out of the user’s control (the order of execution depends on the kernel’s scheduling handler, unknown to the user).
In such a situation where several processes access and manipulate the same data concurrently and the outcome of the execution depends on the particular order in which the access takes place, is called a race condition.
A race condition is NOT desirable. We need to perform process synchronization and coordination among cooperating processes (or equivalently, threads cooperation) to avoid the race condition.
The Critical Section Problem
We define the regions in a program whereby atomicity must be guaranteed as the critical section.
Consider a system consisting of n processes {P0, P1,..., Pn−1}. Each process may have a segment of instructions, called a critical section (CS). The important feature of the system is that when one process is executing its critical section, no other process is allowed to execute its critical section.
In the consumer producer sample code above, the critical section in the producer’s code is the instruction counter++ while the critical section in the consumer’s code is counter -—.
In the critical section the (asynchronous) processes may be:
- Changing common variables,
- Updating a shared table,
- Writing to a common file, and so on.
To support the CS, we need to design a protocol that the processes can use to cooperate or synchronize.
It is a challenging problem to protect a critical section. Therefore, having a critical section in your program is a problem, and it requires complex synchronisation solutions.
There are two basic forms of synchronization:
- Mutual exclusion: No other processes can execute the critical section if there is already one process executing it.
- Condition synchronization: Synchronize the execution of a process in a CS based on certain conditions instead.
Requirements for CS Solution
A solution to guarantee a critical-section must satisfy the following three requirements:
- Mutual exclusion (mutex): No other processes can execute the critical section if there is already one process executing it (in the case of condition synchronization, this is adjusted accordingly)
- Progress: If there’s no process in the critical section, and some other processes wish to enter, we need to grant this permission and we cannot postpone the permission indefinitely.
- Bounded waiting: If process A has requested to enter the CS, there exists a bound on the number of times other processes are allowed to enter the CS before A. This implies that CS is also of a finite length, it cannot loop forever and will exit after a finite number of instructions. It is a requirement that ensures fairness by guaranteeing that every process will eventually get a chance to enter its critical section (CS) after a finite number of other processes have done so.
If the progress condition is violated, meaning no process can ever enter the critical section again, discussing bounded waiting becomes moot. This is because progress is the property that ensures at least one of the processes not in its critical section but wishing to enter is eventually able to do so without interference. Without progress, the system can get stuck in a state where no further entries into critical sections are possible, making the assurance of bounded waiting irrelevant.
Properties
The requirements above result in the following property to a CS solution:
- Safety property: no race condition
- Liveness property: a program with proper CS solution will not hang forever (because technically no progress IS mutex).
Solution Template
The solution template to a CS problem is as follows:
while(true){
[ENTRY SECTION]
CRITICAL SECTION ...
...
[EXIT SECTION]
REMAINDER SECTION ...
...
}
The protocol to approach a CS in general causes the process to:
- Request for permission to enter the section (entry section).
- Execute the critical section when the request is granted
- Exit the CS solution
- There may exist an remainder section
The rest of the program that is not part of the critical section is called the remainder section.
In the next few sections, we discuss several known solutions to CS problems. They are generally divided into these categories:
- Software Mutex Algorithm (purely software only, possible only under restricted conditions, busy waits)
- Hardware Supported Spinlocks (hardware supported, only 1 process in the CS at a time, busy waits)
- Software Spinlocks and Mutex Locks
- Semaphores (does not busy wait, generalization of mutex locks – able to protect two or more identical shared resources)
- Condition variables (does not busy wait, wakes up on condition)
Software Mutex Algorithm
Peterson’s Solution
Peterson’s solution is a software-based approach that solves the CS problem, but two restrictions apply:
- Strictly two processes that alternate execution between their critical sections and remainder sections (can be generalised to
Nprocesses with proper data structures, out of syllabus)- Practically applied in a single core environment only
- Architectures where
LDandSTare atomic1 (i.e: executed in 1 clk cycle, or not interruptible).- Definition: atomically storing a value
xinto a memory location with initial valueymeans that the state of that location shall either bexorywhen an attempt to read it at any point in time is done. No intermediary value shall ever be observed.
- Definition: atomically storing a value
The solution works by utilizing two shared global variables:
int turn;
bool flag[2];
- If
turn == i, processPiis allowed to enter the critical section. Similar otherwise. - If
flag[i] == true, then processPiis ready to enter the critical section.
Initialisation
We can initialize the flag into false for all i, and set turn into arbitrary number (i or j to index two processes Pj and Pi – two processes only for our syllabus) in the beginning.
Algorithm
do{
flag[i] = true;
turn = j;
while (flag[j] && turn == j); // this is a while LINE
// CRITICAL SECTION HERE
// ...
flag[i] = false;
// REMAINDER SECTION HERE
// ...
}while(true)
The algorithm above is the solution for process Pi. The code for Pj is equivalent, just swap all the i to j and vice versa.
- In the
while-loop,Pibusy waits (means try and keep retrying until succeed, thus wasting the quanta given to the process), Piwill be stuck at the while-line (notice it’s NOT a while-loop, there’s a semicolon at the end), for as long asflag[j] == trueandturn == j.
Proof of Correctness
To prove that this solution is correct, we need to show that:
- Mutual exclusion is preserved.
- The progress requirement is satisfied.
- The bounded-waiting requirement is met.
We prove that the Peterson’s solution satisfies all three properties above by tracing how it works:
- When
Piwants to enter the critical section, it will set its own flag;flag[i]intotrue. - Then, it sets
turn=j(instead of itself, i).
You can think of a process as being polite hence requesting the other one (j) to be executed first.
Now two different scenarios might happen.
Scenario 1: Proceed to CS
Pimight break from the while-loop under two possible conditions.
Condition 1: flag[j] == false, meaning that the other Pj is not ready to enter the CS and is also not in the critical section. This ensures mutex.
Condition 2: OR, IF flag[j] == true but turn == i. This means the other process Pj is also about to enter the critical section. No process is in the Critical Section, but it is Pi’s turn, so Pi gets to enter the CS first (ensuring progress).
Scenario 2: Busy-wait
Pi will be stuck with the while-line if flag[j] == true AND turn == j, meaning that Pjis inside the CS.
This satisfies mutual exclusion: flag[i] and flag[j] are both true, but turn is an integer and cannot be both i and j.
- No two processes can simultaneously execute the CS.
Bounded waiting is guaranteed: After Pj is done, it will set its own flag: flag[j] = false, hence ensuring Pi to break out of the while-line and enter CS in the future.
Pionly needs to wait a MAXIMUM of 1 cycle before being able to enter the CS.
You might want to interleave the execution of instructions between Pi and Pj, and convince yourself that this solution is indeed a legitimate solution to the CS problem. Try to also modify some parts: not to use turn, set turn for Pi as itself (i) instead of j, not to use flag, etc and convince yourself whether the 3 correctness property for the original Peterson’s algorithm still apply.
Will Peterson’s work in modern CPUs out of the box?
The short answer is not really. This is not part of the syllabus, so head to the appendix to find out more.
Synchronization Hardware
Peterson’s solution is a software solution that is not guaranteed to work on modern computer architectures where LD/ST might not be atomic (e.g: there are many processors accessing the same location).
We can also solve the CS Problem using hardware solution. All these solutions are based on the premise of hardware locking to protect the critical sections. This is significantly different from software locks. The number of hardware locks per system is physically limited.
Preventing Interrupts
We can intentionally prevent interrupts2 from occurring while a shared variable was being modified.
This only works in single-core systems and is not feasible in multiprocessor environments because:
- Time consuming, need to pass message to all processors
- Affects system clocks
- Decreases efficiency, defeats the purpose of multiprocessors.
The ability to temporarily inhibit interrupts and ensuring that the currently running process cannot be context switched need to be supported at hardware levels in many modern architectures. If no interrupt can occur during a particular CS, then mutual exclusion is trivial.
Atomic Instructions
We can also implement a set of atomic instructions by locking the memory bus. Mutual exclusion is therefore trivial.
This is typically used to provide mutual exclusion in symmetric multiprocessing systems. The common instructions are:
- Swap two memory words:
compare_and_swap() - Test original value of memory word and set its value:
test_and_set()
Example
Lets say CPU1 issues test_and_set(), the modern DPRAM (dual port ram) makes an internal note by storing the address of the memory location in its own dedicated place. If CPU2 also issues test_and_set() to the same location then DPRAM checks its internal note and notices that CPU1 is accessing it, so it will issue a busy interrupt to CPU2.
CPU2 might be busy waiting (spinlock) to retry again (until succeeds). This happens at hardware speed so it is actually not very long at all. After CPU1 is done, the DPRAM erases the internal note, thus allowing CPU2 to execute its test_and_set().
Below are the common (but not limited to) atomic instructions supported at the hardware level. They are used directly by compiler and operating system programmers but are also abstracted and exposed as bytecodes and library functions in higher-level languages like C:
- atomic
readorwrite - atomic
swap test-and-setfetch-and-addcompare-and-swapload-link/store-conditional
Watch this video for fun if you’d like to see incredible visualisation about Peterson’s Solution and why it failed in modern hardware.
Software Spinlocks and Mutex Locks
We need hardware support for certain special atomic assembly-language instructions like test-and-set above. This can be used by application programmers to implement software locking without the need to switch to kernel mode or perform context switch (unless otherwise intended). On architectures without such hardware support for atomic operations, a non-atomic locking algorithm like Peterson’s algorithm can be used.
However, such an implementation may require more memory than a hardware spinlock.
Spinlocks
A spinlock provides mutual exlusion. It is simply a variable that can be initialized, e.g pthread_spinlock_t implemented in C library and then obtained or released using two standard methods like acquire() and release(). An attempt to acquire() the lock causes a process or thread trying to acquire it to wait in a loop (“spin”) while repeatedly checking whether the lock is available.
This is also called busy waiting, hence wasting the caller’s quantum until the caller acquires the lock and can progress.
Example implementation of acquire() in C library:
acquire() {
/* this test is performed using atomic test_and_set and busy wait for the process' CS, hardware supported */
while (!available);
available = false;
}
release(){
available = true;
}
You can create spinlock using C POSIX library: pthread_spin_lock()
static pthread_spinlock_t spinlock;
pthread_spin_init(&spinlock,0);
pthread_spin_lock(&spinlock); // no context switch, no system call, busy waits if not available
// CRITICAL SECTION ...
pthread_spin_unlock(&spinlock);
// REMAINDER SECTION ...
Sharing locks between Processes
In C, the function pthread_spin_init is used to initialize a spinlock. The function signature is
int pthread_spin_init(pthread_spinlock_t *lock, int pshared);.The
psharedparameter can take one of two values:
PTHREAD_PROCESS_SHARED(1): The spinlock can be shared between processes.PTHREAD_PROCESS_PRIVATE(0): The spinlock is only used within a single process.When you use
0as the value for thepsharedparameter, it is equivalent to usingPTHREAD_PROCESS_PRIVATE. This means the spinlock will not be shared outside the process in which it is created.Therefore,
pthread_spin_init(&spinlock, 0);initializesspinlockfor use within the same process, ensuring it is not shared between multiple processes.To share a spinlock outside of processes, read this appendix section.
Busy Waiting
Busy waiting wastes CPU cycles – some other process might be able to use productively, and it affects efficiency tremendously when a CPU is shared among many processes. The spinning caller will utilise 100% CPU time just waiting: repeatedly checking if a spinlock is available.
Does it make much sense to use spinlocks in single-core environment? The spinlock polling is blocking the only available CPU core, and as a result no other process can run. Since no other process can run, the lock won’t be unlocked either.
Nevertheless, spinlocks are mostly useful in places where anticipated waiting time is shorter than a quantum and that multicore is present. No context switch is required when a process must wait on a lock, the calling process simply utilise the special assembly instruction.
Mutex Lock
Some other libraries (like C POSIX library) implement another type of lock called mutex lock that does not cause busy wait.
Mutex locks are also supported by special atomic assembly instructions implemented at hardware level, and requires integration with the Kernel Scheduler because it will put the requesting thread/process to sleep if the lock has already been acquired by some other thread.
Example of POSIX Mutex usage:
// initialize mutex
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_lock(&mutex); // this is acquire() equivalent, atomic and might invoke kernel scheduler and context switch if mutex not available
// CRITICAL SECTION HERE ...
pthread_mutex_unlock(&mutex); // this is release() equivalent, atomic and might invoke kernel scheduler as well to wake up other waiting processes/threads
// REMAINDER SECTION HERE ...
The problem with mutexes is that putting threads to sleep and waking them up again are both rather expensive operations, they’ll need quite a lot of CPU instructions overhead due to the integration with the Kernel Scheduler.
If the CS is short, then the overhead of using mutexes might be more than the time taken to “spin” when using a spinlock. It is up to the programmer which one to use for their purposes.
pthread_mutex_t is typically used among threads in the same process. The mutexes won’t be valid across processes after fork unless we put them in shared memory and we explicitly initialize the mutex attribute with pthread_mutexattr_setpshared set to PTHREAD_PROCESS_SHARED. Semaphore is more commonly used to synchronise between processes.
Semaphores
The semaphore can be seen as a generalised mutex lock. It provides mutual exclusion.
It is implemented at the kernel level, meaning that its execution requires the calling process to change into the kernel mode via trap (SVC) semaphore instructions. Upon initialisation, the semaphore descriptor is inherited across a fork.
A parent process can create a semaphore, open it, and fork. The child process does not need to open the semaphore and can close the semaphore if the application is finished with it. Note that this means you need to destroy a semaphore (just like shared memory) after you’re completely done with it (no other processes or threads using it). You can type the command ipcs -s to see semaphores created in your system.
This is a high-level software solution that relies on synchronization hardware (like those special atomic instructions), and is considered a more robust tool than mutex lock.
Peterson’s solution and the hardware-assisted solutions all require busy waiting. However using semaphore, you can express a solution to the CS problem without busy waiting.
Definition
Semaphore is defined as:
- An integer variable that is maintained in the kernel, initialized to a certain value that represents the number of available resources for the sharing processes
- Is accessed only through two standard atomic System Call operations:
wait()andsignal().
Equivalently, we have acquire() and release() too in some other libraries. acquire() is the same as wait() and release() is the same as signal().
Since calls to signal() or wait() for semaphores must be performed atomically, they are often implemented using one of the synchronization hardware mechanisms (to support multiple cores synchronization) or software mutual exclusion algorithms such as Peterson’s algorithm, when restriction applies.
Usage
Semaphore can be used in two ways:
- Binary semaphore: integer value can be a
0or1. - Counting semaphore: integer can take any value between
0toN.
Implementation
How semaphores avoid busy waiting (well, mostly): it integrates implementation with CPU scheduler, hence the need to make system calls throughout. It will put the calling process that attempts to acquire() on suspension if the semaphore is not currently available.
There are two common CPU scheduling operations (System Calls): block() and wakeup(). Both are used to implement wait() and signal() semaphore functions.
- Whenever the process/thread needs to
wait(), it reduces the semaphore and if the current semaphore value is negative, it blocks itself. - It is added to a waiting queue of processes/threads associated with that semaphore. This is done through the system call
block()on that process.
wait(semaphore *S)
{ S->value--;
if (S->value < 0)
{
add this process to S->list; // this will call block()
}
}
- When a process is completed it calls a
signal()function and one process in the queue is resumed, by using thewakeup()system call.
signal(semaphore *S)
{
S->value++;
if (S->value <= 0)
{
remove a process P from S->list;
wakeup(P);
}
}
Further notes about the above simple implementation of Semaphore wait and signal System Calls:
- Semaphore values may be negative, but this is typically hidden from user
- On the surface, semaphore values are never negative under the classical definition of semaphores with busy waiting.
- If the semaphore value is negative, its magnitude is the number of processes waiting on that semaphore
- The list (a queue of processes waiting to acquire the semaphore) can be easily implemented by a link field in each process control block (PCB).
- Each semaphore data structure for example, can contain an integer value and a pointer to a list of PCBs.
Note that semaphore implementation may vary between different libraries, but the idea remains the same.
Circular Dependency?
How can we implement signal() and wait() atomically without busy waiting, if it relies on synchronization hardware in multiprocessor systems or even basic software mutex algorithms (e.g: if on uniprocessor systems) that requires busy waiting?
The answer is that semaphore DOES NOT completely eliminates busy waiting. Specifically, it ONLY busy waits in the critical section of semaphore function itself: wait(), signal() that is relatively SHORT if implemented properly. We do NOT busy-wait in the CS of the program itself (which can be considerably longer).
In practice, the critical section of the wait() and signal() implementation of the semaphore in the library is almost never occupied (meaning it’s rare that two processes or threads are making the same wait and signal call on the same semaphore), and busy waiting occurs rarely, or if it does happen, it happens for only a short time.
In this specific situation, busy waiting is completely acceptable and still remains efficient.
Applying Semaphore to MPC Problem
Now that we know how semaphore works, it’s useful to think about how they can be applied to tackle the multiple producer-consumer (MPC in short) problem that we analyze earlier in this section above.
The pseudocode below illustrates the idea on how the semaphore can be used to replace counter, and protect the consumer/producer code against multiple (more than 1 of each) consumer/producer threads racing to execute their respective instructions, and sharing resources:
- write index
in(shared among consumer processes) - read index
out(shared among producer processes) char buf[N](shared among all processes)- Semaphores: two counting semaphores,
charsandspaceto keep track of free space and number of characters in the buffer, and two mutex semaphores,mutex_pandmutex_cto provide mutex among producers and among consumers
Shared resources:
char buf[N];
int in = 0; int out = 0;
semaphore chars = 0;
semaphore space = N;
semaphore mutex_p = 1;
semaphore mutex_c = 1;
Producer program:
void send (char c){
wait(space);
wait(mutex_p);
buf[in] = c;
in = (in + 1)%N;
signal(mutex_p);
signal(chars);
}
Consumer program:
char rcv(){
char c;
wait(chars);
wait(mutex_c);
c = buf[out];
out = (out+1)%N;
signal(mutex_c);
signal(space);
}
Condition variables
Condition variables allow a process or thread to wait for completion of a given event on a particular object (some shared state, data structure, anything). It is used to communicate between processes or threads when certain conditions become true.
The “event” is the change in state of some condition that thread is interested in. Until that is satisfied, the process waits to be awakened later by a signalling process/thread (that actually changes the condition).
Condition variables are and should always be implemented with mutex locks. When implemented properly, they provide condition synchronization.
For example, we can initialize a mutex guarding certain CS:
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
And in this example, we assume that a particular CS in Process/Thread 2 cannot be executed if bool cond_x == false. Therefore we can create a condition to represent this:
pthread_cond_t p_cond_x = PTHREAD_COND_INITIALIZER;
Now consider Process/Thread 1 instructions:
pthread_mutex_lock(&mutex);
// CRITICAL SECTION
// ...
cond_x = true;
pthread_cond_signal(&p_cond_x);
pthread_mutex_unlock(&mutex);
… and Process/Thread 2 instructions:
pthread_mutex_lock(&mutex);
while (cond_x == false){
pthread_cond_wait(&p_cond_x, &mutex); // yields mutex, sleeping
}
// CRITICAL SECTION, can only be executed iff cond_x == true
// ...
pthread_mutex_unlock(&mutex);
It is clear that the mutex guards the CS. However, Process 2 should not proceed to its CS if cond_x is false in this example.
Process 2 can be put to sleep by calling condition_wait(); the implementation of this function is integrated into the process scheduler which does the following:
- It gives up the mutex AND
- Sleeps, will not busy wait
When Process 1 has set the variable cond_x into true, it signals Process 2 to continue before giving up the mutex.
- It is important to call
wait()after acquiring the mutex and checking the condition.- You cannot use
unlock()to release the mutex.
- You cannot use
- When Process 2
waitsand eventually sleep, it will give up the lock so as to allow other threads needing the lock to proceed. - When Process 2 has woken up from the
wait(), it automatically reacquires the mutex lock- If Process 1 hasn’t given up the lock, Process 2 will not execute although
cond_xhas been fulfilled
- If Process 1 hasn’t given up the lock, Process 2 will not execute although
This is crucial because it will re-check the state of cond_x again before continuing to the CS. It is also crucial to re-check cond_x before continuing to the CS. Why?
Final Note
A condition variable is effectively a signalling mechanism under the context of a given mutex lock. With mutex lock alone, we cannot easily block a process out of its CS based on any arbitrary condition even when the mutex is available.
By default, condition variables and mutexes cannot be shared across processes. However, you can use condition variables across processes if you make the condition variable process-shared, using condition variable attribute configured with the pthread_condattr_setpshared function and a value of PTHREAD_PROCESS_SHARED. You will also have to make the associated mutex process-shared, using a mutex attribute configured with pthread_mutexattr_setpshared.
Here’s an excerpt from the Linux man page:
The process-shared attribute is set to
PTHREAD_PROCESS_SHAREDto permit a condition variable to be operated upon by any thread that has access to the memory where the condition variable is allocated, even if the condition variable is allocated in memory that is shared by multiple processes. If the process-shared attribute isPTHREAD_PROCESS_PRIVATE, the condition variable shall only be operated upon by threads created within the same process as the thread that initialized the condition variable; if threads of differing processes attempt to operate on such a condition variable, the behavior is undefined. The default value of the attribute isPTHREAD_PROCESS_PRIVATE.
An example skeleton code for mutex and condition variables shared among processes is as follows:
/***** MUTEX *****/
pthread_mutex_t * pmutex = NULL;
pthread_mutexattr_t attrmutex;
/* Initialise attribute to mutex */
pthread_mutexattr_init(&attrmutex);
pthread_mutexattr_setpshared(&attrmutex, PTHREAD_PROCESS_SHARED);
/* Allocate SHARED memory to pmutex here. */
/* Initialise mutex. */
pthread_mutex_init(pmutex, &attrmutex);
/***** CONDITION VARIABLE *****/
pthread_cond_t * pcond = NULL;
pthread_condattr_t attrcond;
/* Initialise attribute to condition */
pthread_condattr_init(&attrcond);
pthread_condattr_setpshared(&attrcond, PTHREAD_PROCESS_SHARED);
/* Allocate memory to pcond here */
/* Initialise condition */
pthread_cond_init(pcond, &attrcond);
/* Use the mutex */
/* Use the condition */
/* Clean up when done */
pthread_cond_destroy(pcond);
pthread_condattr_destroy(&attrcond);
pthread_mutex_destroy(pmutex);
pthread_mutexattr_destroy(&attrmutex);
Summary
This chapter discusses the essentials of synchronization between processes and threads, a critical aspect of operating systems. It covers various synchronization mechanisms including mutexes, semaphores, and condition variables to manage access to shared resources and prevent race conditions. The text also explores practical scenarios like the producer-consumer problem, illustrating how synchronization prevents data inconsistencies and ensures orderly execution.
Key learning points include:
- Producer-Consumer Problem: Explains synchronization needs between two processes using a shared buffer.
- Race Conditions: Discusses how improper access and manipulation of shared data can lead to unpredictable outcomes.
- Critical Section Problem: Introduces solutions for managing access to shared resources, ensuring system stability and correctness.
- Synchronization Techniques: Covers software and hardware methods, including mutexes, semaphores, and condition variables, illustrating their roles in preventing deadlock and ensuring orderly execution of processes.
Appendix
Peterson’s in Modern CPUs
This section is not required in our syllabus. It’s written to satisfy some curiosity that may arise due to the specific requirements of Peterson’s solution: atomic LD/ST, and used in single-core CPU. Only proceed to read these sections if you are prepared to feel 🤯. Otherwise, skip to Synchronisation Hardware.
Try compiling Peterson’s in plain C, and it will NOT work in modern architecture without:
- Ensuring atomic LD/ST
- Ensuring cache coherency in multicore systems
- Applying memory barriers to enforce sequential consistency (not mentioned above to not overcomplicate the syllabus)
First of all, let’s begin with a definition of atomicity:
When an atomic store is performed on a shared variable, no other thread can observe the modification half-complete. “Atomic” in this context means “all or nothing”. When an atomic load is performed on a shared variable, it reads the entire value as it appeared at a single moment in time. Non-atomic loads and stores do not make those guarantees. You can read more about it here.
Note that atomicity does not guarantee you to get the value most recently written by any thread. If you always want to read the most recently written value, then that means you want strict consistency, and strict consistency is a more strict version of sequential consistency (not relevant here).
Non-atomic example
Not all LD/ST instructions are guaranteed to be atomic, we take this for granted. To understand this better, let’s use an analogy. Consider a scenario of a non-atomic database containing student grades that were initialised to null and these two actions performed:
- Professor A is keying in the grade of student
I. Total grade is 75, but he did it via multiple steps: key in5(LSB), then key in7(MSB). This storing of student grade is non-atomic (requires two steps that can be preempted) - Professor B realised that the student’s grade is not 75 but 91, so he would like to update the grade of student
I. He did it via multiple steps as well: key in1(LSB) then9(MSB)
By right, the grade of student I should be 91. However, since the database is not atomic, Professor B action might preempt the intermediary value stored by Professor A (which means the update done by Professor A is not complete yet):
- Professor A update the LSB:
5, grade of the student is05now. - Professor A second update is preempted, Professor B update the LSB:
1, grade of the student is01now - Professor B update the MSB
9, grade of the student is91now. - Professor A update the MSB:
7, grade of the student is71now.
Student I end up having a grade of 71 instead of 91 (got a C instead of an A!). This grade 71 does not belong to anybody, it’s just a catastrophe resulted from non-atomic store made by Professor A.
Torn Write
What happened?
The STORE done by Professor A is not ATOMIC. Professor B indeed executed his action after Professor A, but didn’t realise that Professor A has not finished. Therefore the end state of the student grade is neither the grades that are meant to be set by either professor (neither 75 nor 91). This is known as torn write.
In Peterson’s solution, both processes might attempt to STORE the value of turn in an interleaved fashion (set turn=i, and turn=j). With atomic STORE, we need to be entirely sure that the value stored in turn is ENTIRELY j, or ENTIRELY i, and not some undefined behavior, especially when turn=j and turn=i in both Process i and j are executed near each other, concurrently. If turn is set to be neither i or j due to non-atomic store, mutex guarantee is lost.
Torn Read
The same must happen with the LOAD. Let’s go back to our grade analogy.
Suppose we have Professor C reading the value of student I grade: read LSB then read MSB (non atomic). It is posssible that Professor C reads the student’s grade as 95.
- Professor A update the LSB:
5, grade of the student is05now. - Meanwhile, Professor C read the
LSBgrade of the student:5 - Professor A second update is preempted, Professor B update the LSB:
1, grade of the student is01now - Professor B update the MSB
9, grade of the student is91now. - Meanwhile, Professor C read the
MSBgrade of the student:9 - Professor A update the MSB:
7, grade of the student is71now.
Professor C read neither the old value of the student grade: 75 or the new value of student grade: 91. 95 is the result of a torn read.
In Peterson’s, two instructions: turn==j (LOAD) and turn=i (STORE) must complete atomically. We do not want to read some “neither i nor j” value in turnbecause as we were loading the value of turn, the other process modifies it.
In the past, we have an 8-bit or even 16-bit architecture. Any LOAD or STORE involving more than supported bits will result in non-atomic operations by default. We don’t have to worry about this anymore nowadays in our 64-bit architecture, unless our values are not boundary aligned.
Sequential Consistency
This is actually another requirement for Peterson’s Solution to work, but omitted in the section above to simplify our syllabus. Sequential consistency means (simplified):
The operations of each individual processor appear in a specific sequence in the order specified by its program, and will not be re-ordered by the compiler or executed out-of-order by the CPU.
The Peterson’s Algorithm also required that the order of the instructions executed is consistent,
- Setting of
flag[i] = Truemust happen before forturn = jfor Process i - Setting of
flag[j] = Truemust happen before forturn = ifor Process j - Step (1) and (2) must precede the
LOADaccess in thewhileline.
Not all instructions are executed in order. A compiler may try to be smart and recompile the Peterson’s solution for Process i as follows, reordering the instructions completely since they involve access to different memory location. One possible reordering is:
// Process i code
turn = j
while(flag[j] == True and turn == j); // LOAD from flag[j]
flag[i] = True // STORE to flag[i]
// CS...
// ...
flag[i] = False
The above violates mutual exclusion:
- Suppose Pi has just finished setting
turn = j, goes to thewhilecheck and failed the check, hence proceeding to store toflag[i]but was context switched before being able to do so - Pj starts, and does the same: sets
turn=i, fails thewhilecheck because at this point nobody sets the flags yet, and then setsflag[j] = True, goes to CS and then context switched - When Pi is resumed, it has already passed the
whilecheck, hence both processes are now in the CS
Another possibility is:
// Process i code
turn = j
flag[i] = True // STORE to flag[i]
while(flag[j] == True and turn == j); // LOAD from flag[j]
// CS...
// ...
flag[i] = False
The above violates mutual exclusion too:
- Suppose Pi has just set
turn=jand then context switched - Suppose Pj then resume and set
turn=i, flag[j]=True, then proceed towhilecheck. The check returnsFalsebecauseflag[i]is stillFalse - Pj then enters CS and context switched
- Now Pi is resumed, sets
flag[i]=True(at this point turn isidue to step 2 above), goes to thewhilecheck which also returnsFalse, enabling Pi to enter the CS as well while Pj is still in it
On modern operating system where you have multiple processors, the order of LOAD and STORE instructions can change if these instructions are not dealing with same memory addresses. You can obviously find out why the above is disastrous.
In order to prevent this, you must implement memory barrier. You can look at this post to learn how this is done in C++ as an example.
Optimising local variables (e.g: caching in Register)
Also, a compiler may decide that it is unnecessary to read the same variable more than once, especially if they don’t change during the entire lifetime of the program. It may create a snapshot copy of flag[j] in the register local to Process i, because how could it possibly change if there are no store operations in between?
The store to flag[j] is done in Process j (unknown to Process i). As a result, flag[j] in Process i may always be False.
For instance, assume that Process i is initially scheduled (initialised), and immediately suspended. Then, Process j is scheduled until it reached its CS before preempted. When Process i is scheduled and check flag[j], this will return False because its compiler decided to optimise the instructions and make a copy in Process i’s register on the value of the old flag[j] upon initialisation. As a result, Process i also enter the CS and mutex is violated.
In other words, there are three copies of flag[j] –> one in Process i’s register, one in Process j’s register, and another in the RAM. The value of flag[j] is therefore not consistent.
You can use the volatile keyword in C to let the compiler know that it is possible for a variable’s value to be changed by instructions in another program, or by another Thread executing the same set of instructions, and therefore disable the above optimisations because it is no longer safe to do so.
Objects that are declared as volatile are not used in certain optimizations because their values can change at any time. The system always reads the current value of a volatile object when it is requested, even if a previous instruction asked for a value from the same object. Also, the value of the object is written immediately on assignment.
For example:
volatile int turn;
volatile int flag[2] = {0,0}
Cache Coherency
Attempting to run Peterson’s in multiple core requires cache coherency. Cores have individual caches, and for performance efficiency, each process might cache turn and flag value in its individual caches. This violates sequential consistency requirement explained above – there are multiple copies of turn and flag with different values. We can try to synchronise between the caches but it comes at a huge performance cost (impractical).
Final Caveats for Peterson’s Solution
In summary, Peterson’s solution rests on the assumption that the instructions are executed in a particular order (sequential consistency) and memory accesses can be achieved atomically. Both of these assumptions can fail with modern hardware. Due to complexities in the design of pipelined CPUs, the instructions may be executed in a different order (called out-of-order execution). Additionally, if the threads are running on different cores that do not guarantee immediate cache coherency, the threads may be using different memory values.
In fact, Peterson’s algorithm cannot be implemented correctly in C99, as explained in this article. We need to make sure that we use a sequentially consistent memory order and compilers do not perform additional optimisation hoisting2 or sinking34 load and stores. Also, we need to make sure that the CPU hardware itself does not perform out-of-order execution.
End of brain-tearing sections.
Sample C Code
Mutex
In the example below, we attempt to increase a shared variable counter, guarded by a mutex to prevent race conditions.
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
void *functionC();
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
int counter = 0;
int main()
{
int rc1, rc2;
pthread_t thread1, thread2;
/* Create independent threads each of which will execute functionC */
if ((rc1 = pthread_create(&thread1, NULL, &functionC, NULL)))
{
printf("Thread 1 creation failed: %d\n", rc1);
}
if ((rc2 = pthread_create(&thread2, NULL, &functionC, NULL)))
{
printf("Thread 2 creation failed: %d\n", rc2);
}
// Main thread waits until both threads have finished execution
pthread_join(thread1, NULL);
pthread_join(thread2, NULL);
return 0;
}
void *functionC()
{
pthread_mutex_lock(&mutex);
counter++;
printf("Counter value: %d\n", counter);
pthread_mutex_unlock(&mutex);
}
Condition Variables
Consider a main function with a shared variable count, two mutexes and one condition:
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
pthread_mutex_t count_mutex = PTHREAD_MUTEX_INITIALIZER;
pthread_mutex_t condition_mutex = PTHREAD_MUTEX_INITIALIZER;
pthread_cond_t condition_cond = PTHREAD_COND_INITIALIZER;
void *functionCount1();
void *functionCount2();
int count = 0;
#define COUNT_DONE 10
#define COUNT_HALT1 3
#define COUNT_HALT2 6
int main()
{
pthread_t thread1, thread2;
pthread_create(&thread1, NULL, &functionCount1, NULL);
pthread_create(&thread2, NULL, &functionCount2, NULL);
pthread_join(thread1, NULL);
pthread_join(thread2, NULL);
return 0;
}
Suppose an example where we Thread 1 running functionCount1() is to be halted whenever the count value is between 3 (COUNT_HALT1) and 6 (COUNT_HALT2).
- Otherwise, either thread can increment the counter.
- We can use the condition variable and condition wait to ensure this behavior in
functionCount1():
void *functionCount1()
{
for (;;) // equivalent to while(true)
{
pthread_mutex_lock(&count_mutex);
while (count >= COUNT_HALT1 && count <= COUNT_HALT2)
{
pthread_cond_wait(&condition_cond, &count_mutex);
}
count++;
printf("Counter value functionCount1: %d\n", count);
pthread_mutex_unlock(&count_mutex);
if (count >= COUNT_DONE)
return (NULL);
}
}
We can then use cond_signal in functionCount2() executed by Thread 2:
void *functionCount2()
{
for (;;) // equivalent to while(true)
{
pthread_mutex_lock(&count_mutex);
if (count < COUNT_HALT1 || count > COUNT_HALT2)
{
pthread_cond_signal(&condition_cond);
}
count++;
printf("Counter value functionCount2: %d\n", count);
pthread_mutex_unlock(&count_mutex);
if (count >= COUNT_DONE)
return (NULL);
}
}
Producer-Consumer Problem
In this sample, we try to tackle the single producer single consumer problem with counting semaphore. The shared resources will be an integer array named buffer in this example, of size 10.
The idea is to ensure that producer does not overwrite unconsumed values, and to ensure that consumer does not consume anything before producer puts anything new into the buffer.
Main process to initialise Producer and Consumer Threads:
#include <stdio.h>
#include <stdlib.h>
#include <pthread.h>
#include <semaphore.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/stat.h>
#define RESOURCES 10
#define REPEAT 100
sem_t *blank_space;
sem_t *content;
int buffer[RESOURCES];
int write_index = 0;
int read_index = 0;
int main()
{
// instantiate named semaphore, works on macOS
// sem_t *sem_open(const char *name, int oflag,
// mode_t mode, unsigned int value);
// @mode: set to have R&W permission for owner, group owner, and other user
blank_space = sem_open("blank_space", O_CREAT,
S_IRUSR | S_IWUSR | S_IRGRP | S_IWGRP | S_IROTH | S_IWOTH,
RESOURCES);
printf("%p \n", (void *)blank_space);
if (blank_space == (sem_t *)SEM_FAILED)
{
printf("Sem Open Failed.\n");
exit(1);
}
content = sem_open("content", O_CREAT,
S_IRUSR | S_IWUSR | S_IRGRP | S_IWGRP | S_IROTH | S_IWOTH,
0);
printf("%p \n", (void *)content);
if (content == (sem_t *)SEM_FAILED)
{
printf("Sem Open Failed.\n");
exit(1);
}
pthread_t producer, consumer;
pthread_create(&producer, NULL, producer_function, NULL);
pthread_create(&consumer, NULL, consumer_function, NULL);
printf("Joining threads\n");
pthread_join(producer, NULL);
pthread_join(consumer, NULL);
// if you don't destroy, it persists in the system
// run the command: ipcs -s
// to remove: ipcrm -s <sem_id>
sem_unlink("blank_space");
sem_unlink("content");
return 0;
}
Producer Thread instruction:
void *producer_function(void *arg)
{
for (int i = 0; i < REPEAT; i++)
{
// wait
sem_wait(blank_space);
// write to buffer
buffer[write_index] = i;
// advance write pointer
write_index = (write_index + 1) % RESOURCES;
// signal
sem_post(content);
}
return NULL;
}
Consumer Thread instruction:
void *consumer_function(void *arg)
{
for (int i = 0; i < REPEAT; i++)
{
// wait
sem_wait(content);
// read from buffer
int value = buffer[read_index];
printf("Consumer reads: %d \n", value);
// advance write pointer
read_index = (read_index + 1) % RESOURCES;
// signal
sem_post(blank_space);
}
return NULL;
}
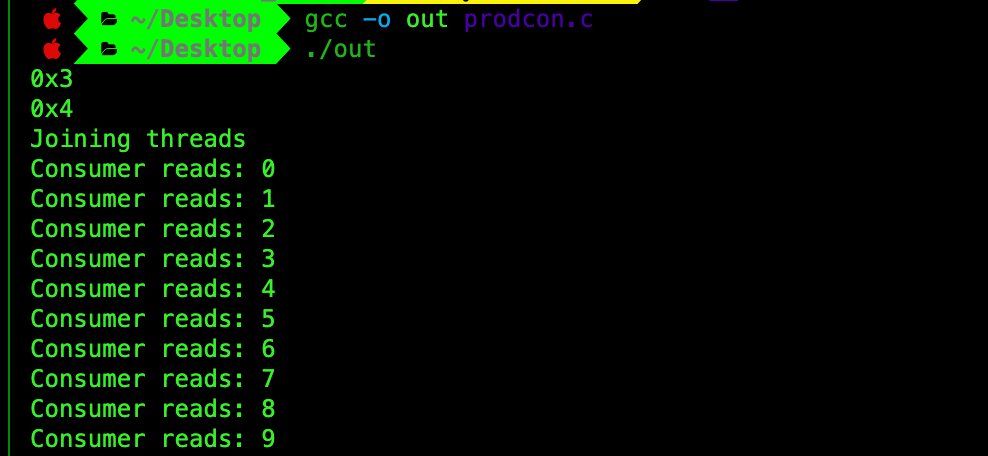
Paste the two functions above before main(). After you compile and run the code, you should have an output as such where consumer thread nicely prints out the numbers put into the buffer by producer in sequence (and stops at 100):
Cleanup
To remove unused semaphores, shared memory, and message queues in your system created by you, use the bash script:
#!/bin/bash
ipcs -m | grep `whoami` | awk '{ print $2 }' | xargs -n1 ipcrm -m
ipcs -s | grep `whoami` | awk '{ print $2 }' | xargs -n1 ipcrm -s
ipcs -q | grep `whoami` | awk '{ print $2 }' | xargs -n1 ipcrm -q
Don’t forget to chmod +x [your-bash-script-name].sh before executing it.
Share Spinlock Between Processes
To share a pthread_spinlock_t outside the process, you need to use the PTHREAD_PROCESS_SHARED (this value is 1) option during initialization. This allows the spinlock to be used in a shared memory region accessible by multiple processes.
Here is how you can do it:
- Initialize the spinlock with
PTHREAD_PROCESS_SHARED. - Allocate the spinlock in a shared memory segment.
Here’s an example using POSIX shared memory:
Step-by-Step Example
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <sys/mman.h>
#include <pthread.h>
#include <unistd.h>
#define SHM_NAME "/my_shared_memory"
int main() {
int shm_fd;
pthread_spinlock_t *spinlock;
// Create shared memory object
shm_fd = shm_open(SHM_NAME, O_CREAT | O_RDWR, 0666);
if (shm_fd == -1) {
perror("shm_open");
exit(EXIT_FAILURE);
}
// Set size of the shared memory object
if (ftruncate(shm_fd, sizeof(pthread_spinlock_t)) == -1) {
perror("ftruncate");
exit(EXIT_FAILURE);
}
// Map shared memory object
spinlock = mmap(NULL, sizeof(pthread_spinlock_t), PROT_READ | PROT_WRITE, MAP_SHARED, shm_fd, 0);
if (spinlock == MAP_FAILED) {
perror("mmap");
exit(EXIT_FAILURE);
}
// Initialize spinlock with PTHREAD_PROCESS_SHARED
if (pthread_spin_init(spinlock, PTHREAD_PROCESS_SHARED) != 0) {
perror("pthread_spin_init");
exit(EXIT_FAILURE);
}
// Use the spinlock in the parent process
pthread_spin_lock(spinlock);
printf("Parent: Acquired the spinlock\n");
// Fork a child process to demonstrate sharing
pid_t pid = fork();
if (pid == -1) {
perror("fork");
exit(EXIT_FAILURE);
} else if (pid == 0) {
// Child process
if (pthread_spin_lock(spinlock) == 0) {
printf("Child: Acquired the spinlock\n");
pthread_spin_unlock(spinlock);
} else {
perror("pthread_spin_lock");
}
exit(EXIT_SUCCESS);
}
// Wait for the child to finish
wait(NULL);
// Release the spinlock in the parent process
pthread_spin_unlock(spinlock);
// Cleanup
pthread_spin_destroy(spinlock);
munmap(spinlock, sizeof(pthread_spinlock_t));
shm_unlink(SHM_NAME);
return 0;
}
Detailed steps:
- Creating Shared Memory:
shm_open: Creates or opens a shared memory object.ftruncate: Sets the size of the shared memory object.mmap: Maps the shared memory object into the process’s address space.
- Initializing the Spinlock:
pthread_spin_init: Initializes the spinlock withPTHREAD_PROCESS_SHARED, allowing it to be shared between processes.
- Using the Spinlock:
- The parent process locks the spinlock.
- A child process is created using
fork. - The child process attempts to lock the spinlock. If successful, it demonstrates that the spinlock is shared.
- Cleanup:
- The spinlock is unlocked and destroyed.
- The shared memory is unmapped and unlinked.
This example demonstrates how to share a spinlock between processes using shared memory. The child process is able to lock and unlock the same spinlock initialized by the parent process.
-
An operation acting on shared memory is atomic if it completes in a single step relative to other threads. For example, when an atomic store is performed on a shared variable, no other thread/process can observe the modification half-complete. ↩
-
You know this as a non-preemptive approach, and some kernels are non-preemptive (non-interruptible) and therefore will not face the race condition in the kernel level itself. ↩ ↩2
-
Loop-invariant expressions can be hoisted out of loops, thus improving run-time performance by executing the expression only once rather than at each iteration. Example can be found here. ↩
-
Code Sinking is a term for a technique that reduces wasted instructions by moving instructions to branches in which they are used. ↩