 50.005 CSE
50.005 CSE
50.005 Computer System Engineering
Information Systems Technology and Design
Singapore University of Technology and Design
Natalie Agus (Summer 2025)
TinyOS Process Scheduling and Synchronization
You are expected to continue where you left off from Lab 2. We will be using TinyOS in this lab to implement more user processes and synchronise their execution using Semaphore.
Checkoff and Lab Questionnaire
You are required to finish the lab questionnaire on eDimension and complete two CHECKOFF during this session. Simply show that your bsim simulates the desirable checkoff outcome for Part A and Part B (binary grading, either you complete it or you don’t) of the lab. Read along to find out more.
There will be no makeup slot for checkoff for this lab. If you miss the class in Week 4 with no LOA, you get zero. If you have LOA, show it to our TAs and you can checkoff during the following Week’s Lab session or at the TA’s discretion.
TinyOS Process Scheduler
The timesharing system in TinyOS is supported by a round-robin scheduler,
Scheduler:
PUSH(LP)
CMOVE(UserMState, r0)
LD(CurProc, r1)
CALL(CopyMState) | Copy UserMState -> CurProc
LD(CurProc, r0)
ADDC(r0, 4*31, r0) | Increment to next process..
CMPLTC(r0,CurProc, r1) | End of ProcTbl?
BT(r1, Sched1) | Nope, its OK.
CMOVE(ProcTbl, r0) | yup, back to Process 0.
Sched1: ST(r0, CurProc) | Here's the new process;
ADDC(r31, UserMState, r1) | Swap new process in.
CALL(CopyMState)
LD(Tics, r0) | Reset TicsLeft counter
ST(r0, TicsLeft) | to Tics.
POP(LP)
JMP(LP) | and return to caller.
The Process Table
The scheduler relies on a kernel data structure called the Process Table (symbolised as ProcTbl). It saves the states of the paused process so we can resume them later when it is their turn to run again.
ProcTbl:
STORAGE(29) | Process 0: R0-R28
LONG(P0Stack) | Process 0: SP
LONG(P0Start) | Process 0: XP (= PC)
STORAGE(29) | Process 1: R0-R28
LONG(P1Stack) | Process 1: SP
LONG(P1Start) | Process 1: XP (= PC)
STORAGE(29) | Process 2: R0-R28
LONG(P2Stack) | Process 2: SP
LONG(P2Start) | Process 2: XP (= PC)
CurProc: LONG(ProcTbl)
The scheduler is invoked by periodic clock interrupts or when a user-mode program makes a Yield() supervisor call. Notice that we use the clock option in the beginning of the script:
.options clock
This clock will cause asynchronous interrupt that calls BR(I_Clk) on every rising edge. This handler labelled I_Clk decides whether a process swap swap is needed or not. We have seen this before in Week 2 lab when we went through all asynchronous interrupt handler.
Tics: LONG(2) | Number of clock interrupts/quantum.
TicsLeft: LONG(0) | Number of tics left in this quantum
I_Clk: ENTER_INTERRUPT() | Adjust the PC!
ST(r0, UserMState) | Save R0 ONLY, for now.
LD(TicsLeft, r0) | Count down TicsLeft
SUBC(r0,1,r0)
ST(r0, TicsLeft) | Now there's one left.
CMPLTC(r0, 0, r0) | If new value is negative, then
BT(r0, DoSwap) | swap processes.
LD(UserMState, r0) | Else restore r0, and
JMP(XP) | return to same user.
DoSwap: LD(UserMState, r0) | Restore r0, so we can do a
SAVESTATE() | FULL State save.
LD(KStack, SP) | Install kernel stack pointer.
CALL(Scheduler) | Swap it out!
BR(I_Rtn) | and return to next process.
User Programs
tinyOS.uasm also contains code for three programs. Each program runs in a separate user-mode process.
Process 0
Process 0 prompts the user for new lines of input in P0Read. It then reads lines from the keyboard in P0RdCh using the GetKey() supervisor call and sends them to Process 1 in P0PutC using the Send() procedure.
Prompt: semaphore(1) | To keep us from typing next prompt
| while P1 is typing previous output.
P0Start:WrMsg()
.text "Start typing, Bunky.\n\n"
P0Read: Wait(Prompt) | Wait until P1 has caught up...
WrMsg() | First a newline character, then
.text "\n"
LD(Count3, r0) | print out the quantum count
HexPrt() | as part of the count, then
WrMsg() | the remainder.
.text "> "
LD(P0LinP, r3) | ...then read a line into buffer...
P0RdCh: GetKey() | read next character,
WrCh() | echo back to user
CALL(UCase) | Convert it to upper case,
ST(r0,0,r3) | Store it in buffer.
ADDC(r3,4,r3) | Incr pointer to next char...
CMPEQC(r0,0xA,r1) | End of line?
BT(r1,P0Send) | yup, transmit buffer to P1
CMPEQC(r3,P0LinP-4,r1) | are we at end of buffer?
BF(r1,P0RdCh) | nope, read another char
CMOVE(0xA,r0) | end of buffer, force a newline
ST(r0,0,r3)
WrCh() | and echo it to the user
P0Send: LD(P0LinP,r2) | Prepare to empty buffer.
P0PutC: LD(r2,0,r0) | read next char from buf,
CALL(Send) | send to P1
CMPEQC(r0,0xA,r1) | Is it end of line?
BT(r1,P0Read) | Yup, read another line.
ADDC(r2,4,r2) | Else move to next char.
BR(P0PutC)
P0Line: STORAGE(100) | Line buffer.
P0LinP: LONG(P0Line)
P0Stack:
STORAGE(256)
Bounded Buffer FIFO
Send() implements a bounded buffer that is synchronized through the use of semaphores in user mode. Recall that a semaphore is a service provided by the Kernel so that two isolated processes running on a Virtual Machine can communicate and synchronize.
The bounded buffer FIFO routine for our Beta (in user mode) is as follows. It follows the producer and consumer model, and the shared buffer can be found at FIFO having a size of 100 words.
FIFOSIZE = 100
FIFO: STORAGE(FIFOSIZE) | FIFO buffer.
IN: LONG(0) | IN pointer: index into FIFO
OUT: LONG(0) | OUT pointer: index into FIFO
Chars: semaphore(0) | Flow-control semaphore 1
Holes: semaphore(FIFOSIZE) | Flow-control semaphore 2
||| Send: put <r0> into fifo.
Send: PUSH(r1) | Save some regs...
PUSH(r2)
Wait(Holes) | Wait for space in buffer...
LD(IN,r1) | IN pointer...
MULC(r1,4,r2) | Compute 4*IN, word offset
ST(r0,FIFO,r2) | FIFO[IN] = ch
ADDC(r1,1,r1) | Next time, next slot.
CMPEQC(r1,FIFOSIZE,r2) | End of buffer?
BF(r2,Send1) | nope.
CMOVE(0,r1) | yup, wrap around.
Send1: ST(r1,IN) | Tuck away input pointer
Signal(Chars) | Now another Rcv() can happen
POP(R2)
POP(r1)
RTN()
||| Rcv: Get char from fifo into r0.
Rcv: PUSH(r1)
PUSH(r2)
Wait(Chars) | Wait until FIFO non-empty
LD(OUT,r1) | OUT pointer...
MULC(r1,4,r2) | Compute 4*OUT, word offset
LD(r2,FIFO,r0) | result = FIFO[OUT]
ADDC(r1,1,r1) | Next time, next slot.
CMPEQC(r1,FIFOSIZE,r2) | End of buffer?
BF(r2,Rcv1) | nope.
CMOVE(0,r1) | yup, wrap around.
Rcv1: ST(r1,OUT) | Tuck away input pointer
Signal(Holes) | Now theres space for 1 more.
POP(R2)
POP(r1)
RTN()
In short, CALL(Send) sends datum in r0 through pipe (produce) and CALL(Rcv) reads datum from pipe into r0 (consume). Any process calling Send and Rcv will be synchronised using the semaphores Chars and Holes, analogous to what we have learned during the lecture.`
“Pipe” is a name given that signifies the means of communication between two processes using shared memory region. It is implemented via FIFO bounded buffer and semaphore. The user processes simply CALL(Send) or CALL(Rcv) to “use” the pipe. The TinyOS is so simple and does not implement address virtualisation, so the statement of “shared memory” feels redundant because any process can LD/ST directly from another process’ address space, but you can think of the FIFO buffer as a “legally” shared memory region between the two communicating processes.
Kernel Semaphore
Recall that a semaphore is a variable used to control access to a common resource by multiple processes. In other words, it is a variable controlled by the Kernel to allow two or more processes to synchronise. The semaphore can be seen as a generalised mutual exclusion (mutex) lock. It is implemented at the kernel level, meaning that the execution of semaphore operations (WaitH, and SignalH) requires the calling process to change into the kernel mode.
In its simplest form, Semaphore can be thought of as a data structure that contains a guarded integer that represents the number of resources available for the pool of processes that require it.
The instructions in tinyOS.uasm that implements Semaphore is as follows:
WaitH: LD(r3,0,r0) | Fetch semaphore value.
BEQ(r0,I_Wait) | If zero, block..
SUBC(r0,1,r0) | else, decrement and return.
ST(r0,0,r3) | Store back into semaphore
BR(I_Rtn) | and return to user.
||| Kernel handler: signal(s):
||| ADDRESS of semaphore s in r3.
SignalH:LD(r3,0,r0) | Fetch semaphore value.
ADDC(r0,1,r0) | increment it,
ST(r0,0,r3) | Store new semaphore value.
BR(I_Rtn) | and return to user.
Unlike real-world applications, this lab does not actually implement virtual addressing so there’s no separation between Kernel and User space in memory (although it has dual mode to prevent interrupts in Kernel mode) due to simplification. We can still perform a LD to Kernel variables in User Mode in this lab as User processes also work in the physical space.
Auxiliaries for User Process
There are other auxiliaries created for the user programs, such as to convert char in r0 to upper case (UCase) and test if R0 is a vowel; put boolean answer into R1 (VowelP). You can read their instructions near the end of P0 instructions in tinyOS.uasm.
| Auxilliary routine: convert char in r0 to upper case:
UCase: PUSH(r1)
CMPLEC(r0,'z',r1) | Is it beyond 'z'?
BF(r1,UCase1) | yup, don't convert.
CMPLTC(r0,'a',r1) | Is it before 'a'?
BT(r1, UCase1) | yup, no change.
SUBC(r0,'a'-'A',r0) | Map to UPPER CASE...
UCase1: POP(r1)
RTN()
| Auxilliary routine: Test if <r0> is a vowel; boolean into r1.
VowelP: CMPEQC(r0,'A',r1) | Sorta brute force...
BT(r1,Vowel1)
CMPEQC(r0,'E',r1) BT(r1,Vowel1)
CMPEQC(r0,'I',r1) BT(r1,Vowel1)
CMPEQC(r0,'O',r1) BT(r1,Vowel1)
CMPEQC(r0,'U',r1) BT(r1,Vowel1)
CMPEQC(r0,'Y',r1) BT(r1,Vowel1)
CMOVE(0,r1) | Return FALSE.
Vowel1: RTN()
Part A: Add fourth user-mode process P3 that reports mouse clicks
In this task, we would have to modify the kernel to add support for a fourth user-mode process. Add user-mode code for the new process that calls Mouse() and then prints out a message of the form:
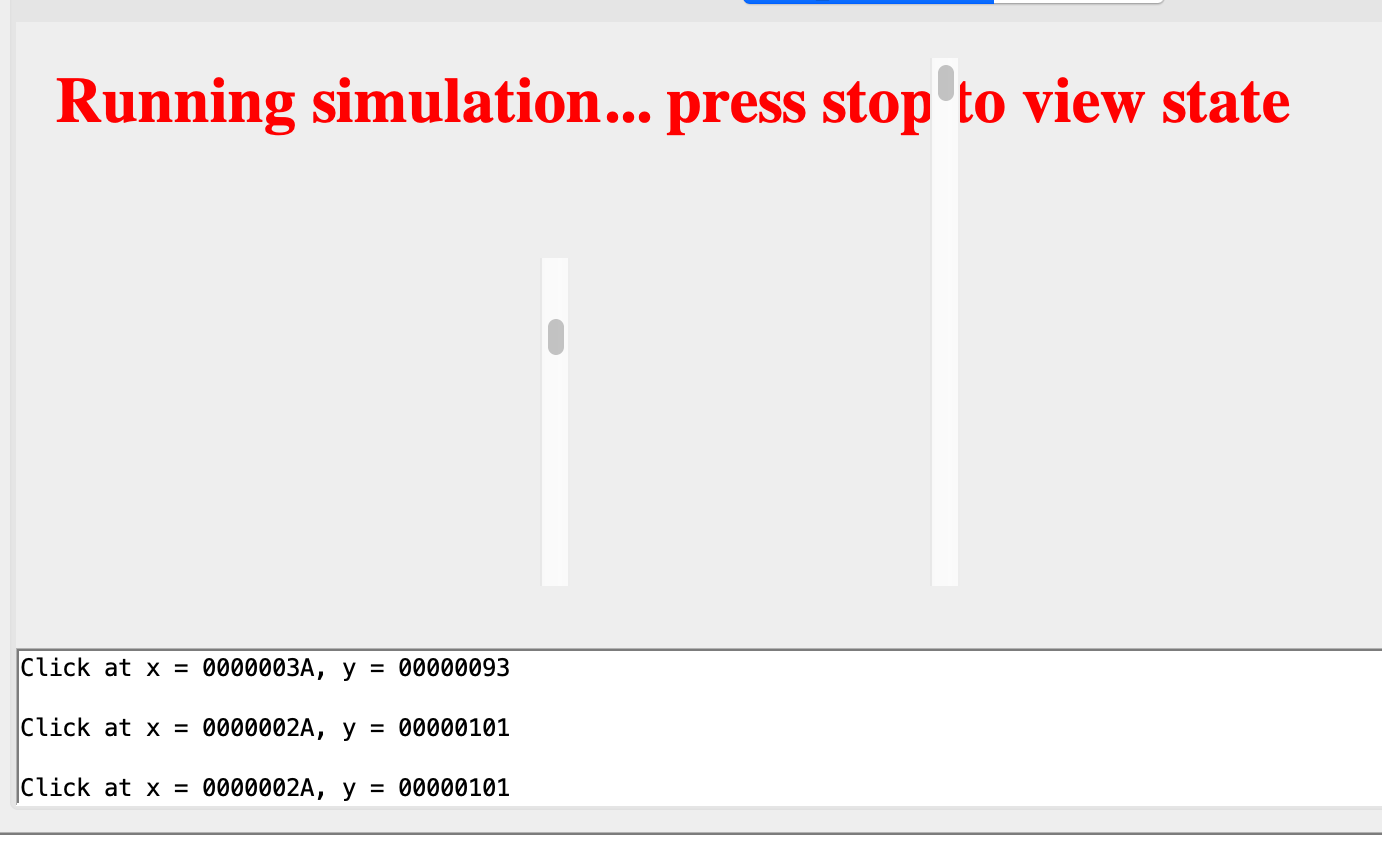
Each click message should appear on its own line (i.e., it should be preceded and followed by a newline character). You can use WrMsg() and HexPrt() to send the message; see the code for Process 0 for an example of how this is done. Write the instruction for P3 below where P2 ends. For instance:
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
||| LAB 4 PART A: USER MODE Process 3 -- Display Mouse info click
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
P3Start:
|||| LAB 4 PART A -- make MOUSE SVC call and print it out
... your answer here
Scheduling P3
You also need to modify the Kernel’s process table to support the scheduling of four processes instead of three.
||| The kernel variable CurProc always points to the ProcTbl entry
||| corresponding to the "swapped in" process.
ProcTbl:
STORAGE(29) | Process 0: R0-R28
LONG(P0Stack) | Process 0: SP
LONG(P0Start) | Process 0: XP (= PC)
STORAGE(29) | Process 1: R0-R28
LONG(P1Stack) | Process 1: SP
LONG(P1Start) | Process 1: XP (= PC)
STORAGE(29) | Process 2: R0-R28
LONG(P2Stack) | Process 2: SP
LONG(P2Start) | Process 2: XP (= PC)
.. add more process control block here
Task 1
CHECKOFF: Demonstrate the above result of printing the mouse coordinates (when the mouse clicks at the terminal area) to your instructor / TA in class.
Synchronization using Semaphore
Finally, you need to coordinate the operation of the user-mode processes so that click messages only appear after the prompt has been output but before you have started typing in a sentence to be translated. This can be done using semaphores.
Part B: Synchronize mouse reporting with other I/O using Semaphores
In other words, once you start typing in a sentence, click messages should be delayed until after the next prompt. If the user clicks multiple times after they have started typing, only a SINGLE click message needs to be displayed (describing either the first or last click, your choice).
You may declare a mouse semaphore in P3, and immediately Wait (attempt to decrease) for the Semaphore:
MouseSemaphore: semaphore(0) | Semaphore for mouse, initialised from zero
P3Start:
Wait(MouseSemaphore) | proceed only when prompt has shown
| ... implement printing of click coordinates here
Signal(Prompt) | signal the prompt so it will print another prompt
| ... continue implementation
Take your time to understand fully how Wait(Prompt) and Signal(Prompt) works on Semaphore prompt in P0 and P1. Note that P0 and P1 synchronises its execution because the prompt printing in P0 only happens after P1 has finished printing out the piglatin!
Non-blocking System Call (SVC)
You also need two more non-blocking supervisor calls to check for any keyboard press and check for any mouse click because we need to know whether we have typed something (and delay the mouse click printout in P3):
.macro CheckMouse() SVC(9) | Part D: TO CHECK MOUSE CLICK, NON BLOCKING
.macro CheckKeyboard() SVC(10) | Part D: TO CHECK KEYBOARD CLICK, NON BLOCKING
Update the corresponding SVC_tbl to support these two:
SVCTbl: UUO(HaltH) | SVC(0): User-mode HALT instruction
UUO(WrMsgH) | SVC(1): Write message
...
UUO(CheckMouseH)| SVC(9) : CheckMouse()
UUO(CheckKeyH) | SVC(10) : CheckKeyboard()
The implementation of the two service handlers above is suggested to be as follows:
||| LAB 4 PART B: add new handler to check keyboard state, but doesn't clear it and doesn't block the calling process
CheckKeyH:
LD(Key_State, r0)
ST(r0,UserMState) | return it in R0.
BR(I_Rtn) | and return to user.
||| LAB 4 PART B: add new handler to check mouse state, but doesn't clear it and doesn't block the calling process
CheckMouseH:
LD(Mouse_State, r0) | put the content of Mouse_State to R0
ST(r0,UserMState) | return it in R0 of the user state since UserMState points to the R0 of the user reg value
BR(I_Rtn) | and return to user
And then, somewhere in P0 after the prompt is printed out, you should check whether there exist mouse click OR keyboard click, and signal (increase) the semaphore accordingly:
P0Read: Wait(Prompt) | Wait until P1 has caught up...
WrMsg() | First a newline character, then
.text "\n"
LD(Count3, r0) | print out the quantum count
HexPrt() | as part of the count, then
WrMsg() | the remainder.
.text "> "
LD(P0LinP, r3) | ...then read a line into buffer...
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
||||| LAB 4 PART B: TO SYNCHRONISE, busy wait
beginCheckMouse:
CheckMouse()
CMPEQC(R0, -1, R0) | "empty" mouse click buffer contains -1, because 0 is a coordinate
BNE(R0, beginCheckKeyboard)
Signal(MouseSemaphore) | if there is mouse click, give signal
Yield() | let P3 print sooner, give up the current quanta
BR(P0Read) | and restart process
beginCheckKeyboard:
CheckKeyboard()
BEQ(R0, beginCheckMouse)
||||| END OF Part B
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
P0RdCh: GetKey() | read next character,
WrCh() | echo back to user
...
beginCheckMouse assumes that Mouse_State is set to LONG(-1) if there’s no mouse click. If you didn’t handle this case properly during Lab 2 checkoff, you need to edit this function. Change e.g: change CMPEQC(R0, -1, R0) into CMPEQC(R0, 0, R0) if you use LONG(0) to indicate absence of mouse click.
In summary, here’s what is supposed to happen:
P0is scheduled first, print out one prompt, and loop betweenbeginCheckMouseandbeginCheckKeyboard- If there’s no mouse click, and no keyboard press, and timer interrupts,
P1, and thenP2will continue as per normal. WhenP3is eventually scheduled, it will not print any mouse click either because there’s no mouse click thus far. - If there’s mouse click and no keyboard press,
P0will increaseMouseSemaphoreandyield, which eventually leads toP3being scheduled sooner. This allowsP3to progress and print the click coordinates, after whichP3will increasePromptSemaphore. WhenP0is scheduled back, it will print another prompt and go back to the loop in step (1). - If there’s keyboard press first, then
P0RdChroutine will be executed, where user input will be reflected on the screen and piglatin will be printed after user presses the return carriage (Enter). If there’s mouse click during this time,P3will not advance and print the click message becauseMouseSemaphorevalue is 0. The only way to increase it is whenbeginCheckMouseroutine inP0goes through. - Only after the user presses the return carriage, and
P1prints the piglatin andSignal(Prompt), thenP0can print the prompt and enterbeginCheckMouseagain. If any mouse press is made when the user was in the middle of typing something, then we will process the mouse click now.
Task 2
Your OS should now be able to report mouse clicks: one click printed per click, doesn’t matter if you spammed. Notice the number within the prompt must also increase (proving that P2 is scheduled properly).
When youre in the middle of typing something, e.g: Hello in the example, any click should not cause you to print any mouse coordinates until after the user entered the message (pressed carriage return).
CHECKOFF: Demonstrate the above result of delayed printing the mouse coordinates (when the mouse clicks at the terminal area and user has started typing) to your instructor / TA in class. Only one mouse click should be reported.
Summary
Notice that P0 doesn’t have to confirm that P3 has finished one round of execution (printing of x, y coordinate) before restarting to BR(P0Read) because we know that the round robin scheduler will surely execute P3 for a round once P0 calls Yield(). With the scheduler’s round robin policy and long enough quanta dedicated for each process, there won’t be the undesirable condition whereby P0 Yield() immediately returns execution to P0 again, before P3 resumes and then accidentally Signal the MouseSemaphore the second time (because it hasn’t been cleared by P3 that hasn’t progressed!).
Even if the scheduler is not in round-robin manner, multiple prompt prints is also prevented by the Wait(Prompt) in the beginning of P0Read for this lab, which will eventually block P0 if neither P3 nor P1 is scheduled to Signal(Prompt) and have the same effect anyway, but it’s important that you understand why you’re lucky!
Be very careful when using Semaphore. You might run into deadlock.
In the case that Wait(prompt) does not exist, without the round robin policy MouseSemaphore value might accidentally be increased to 2 or more and we might have a future Click message printed out at the same time while typing some messages at the console, violating the condition required for Task 2 in this lab. If we want to fix this (e.g: assume there’s some form of priority scheduling policy used instead of round robin policy), we might have to check that a new mouse click is actually made in CheckMouseH by storing the previous history of mouse click at all times.