- TOC
50.005 Computer System Engineering
Information Systems Technology and Design
Singapore University of Technology and Design
Materials Adapted from MIT 6.004
Tiny OS
This Lab will be used in 50.005 Computer System Engineering in Term 5 (Week 1-2) to gently bridge your knowledge from the last 3 weeks of 50.002 to the first 2 weeks of 50.005. You are free to read around if you’d like to get started early.
Starter Code
Download the following file and place it inside your /50002/ folder. This is what you’re going to open and modify or study for this lab, then submit (unless otherwise stated):
Related Class Materials
The lecture notes on Virtual Machine, and Asynchronous handling of I/O Devices are closely related to this lab.
Related sections in Virtual Machine:
- The OS Kernel: The “TinyOS” in this lab represents a very simple kernel that timeshare the execution of three processes: P0, P1, and P2. It keeps track of the execution of these processes via a process table
- OS Multiplexing and Context Switching: Round robin execution of P0, P1, and P2 in the lab
- Asynchronous Interrupt Hardware: Input from Keyboard and Mouse will interrupt the current process while safely saving the current process’ context for later execution
- Asynchronous Interrupt Handler: the TinyOS is in charge of handling asynchronous Keyboard and Mouse interrupt from the user
- Trap or Synchronous Interrupt: A process can ask for user input or OS Services via an ILLOP, thereby forcing a synchronous interrupt or trap for the TinyOS to handle
Related sections in Asynchronous handling of I/O Devices:
- The Supervisor Call: More details on trap
- Asynchronous Input Handling and Real time I/O Handling: More details on async IO due to Keyboard and Mouse interrupt, as well as timer interrupt
Introduction: The Tiny OS
tinyOS_submit.uasm is a program that implements a minimal Kernel supporting a simple timesharing system. Use BSim to load this file, assemble, and then run tinyOS_submit.uasm. The following prompt should appear in the console pane of the BSim Display Window:

As you type, each character is echoed to the console and when you hit return the whole sentence is translated into Pig Latin and written to the console:
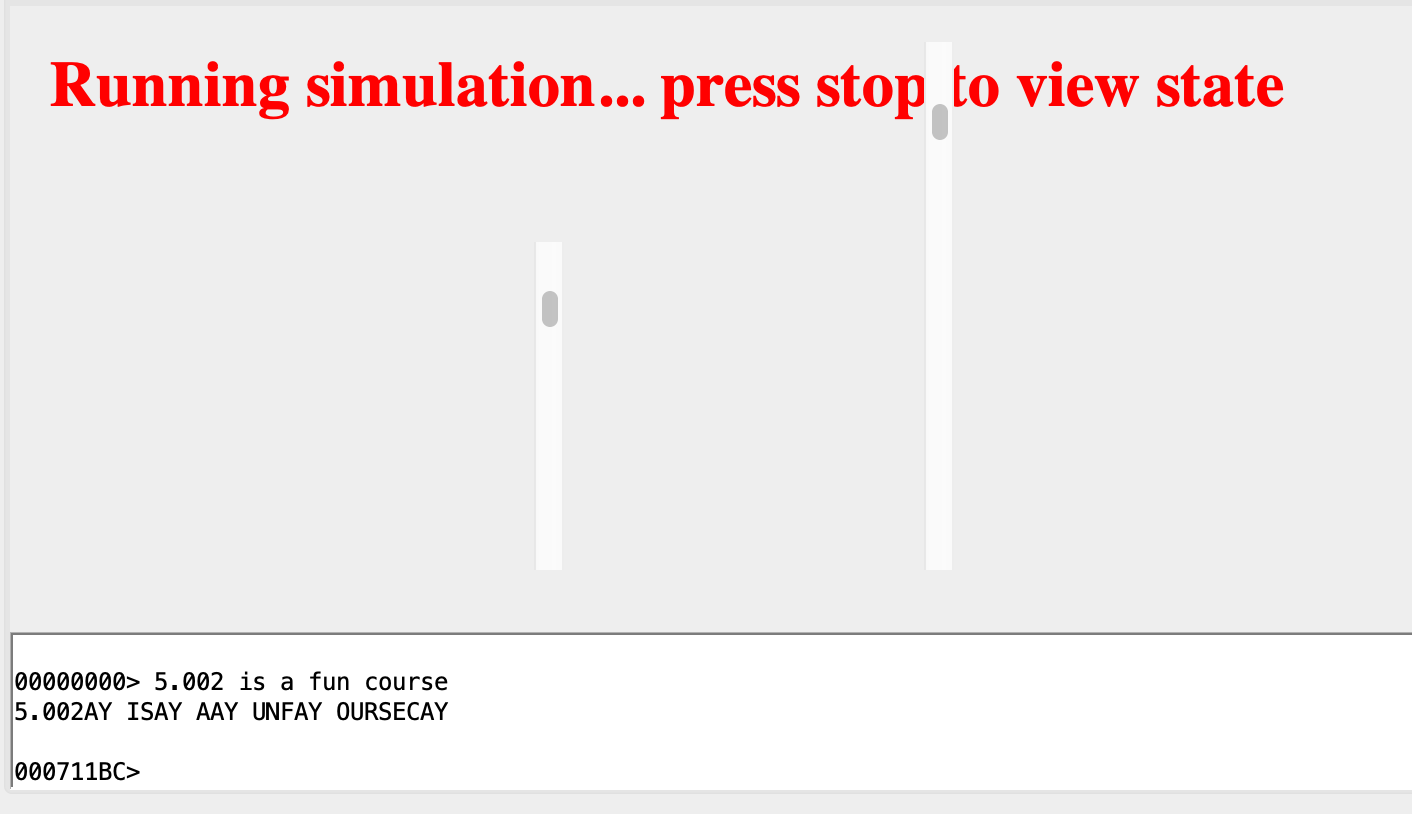
The hex number 0x000711BC written out in the screenshot above as part of the prompt is a count of the number of times one of the user-mode processes (Process 2) has been scheduled while you typed in the sentence or leave the program idling.
Asynchronous Interrupts
tinyOS_submit.uasm implements the following functionality to support Asynchronous Interrupts:
- Kernel-mode vector interrupt routine for handling input from the keyboard, clock, reset, and illegal instruction (trap).
1
2
3
4
5
6
7
8
9
10
11
12
||| Interrupt vectors:
. = VEC_RESET
BR(I_Reset) | on Reset (start-up)
. = VEC_II
BR(I_IllOp) | on Illegal Instruction (eg SVC)
. = VEC_CLK
BR(I_Clk) | On clock interrupt
. = VEC_KBD
BR(I_Kbd) | on Keyboard interrupt
. = VEC_MOUSE
BR(I_BadInt) | on mouse interrupt
- A keyboard key press causes the asynchronous interrupt to occur, which results in the execution of a keyboard interrupt handler labelled
I_Kbd. Incoming characters are stored in a kernel buffer calledKey_Statefor subsequent use by user-mode programs.
1
2
3
4
5
6
7
8
Key_State: LONG(0) | 1-char keyboard buffer.
I_Kbd: ENTER_INTERRUPT() | Adjust the PC!
ST(r0, UserMState) | Save ONLY r0...
RDCHAR() | Read the character,
ST(r0,Key_State) | save its code.
LD(UserMState, r0) | restore r0, and
JMP(xp) | and return to the user.
- The same logic applies for
I_Reset,I_Illop, andI_Clk. You can inspect the relevant instructions under these labels intinyOS_submit.uasm.
Synchronous Interrupts
tinyOS_submit.uasm implements the a few functionalities to support Synchronous Interrupts (also known as trap or supervisor call). Kernel-mode supervisor call dispatching and a repertoire of call handlers that provide simple I/O services to user-mode programs include:
Halt()– stop a user-mode process (equivalent to closing or killing the process)WrMsg()– write a null-terminatedASCIIstring to the console. The string immediately follows theWrMsg()instruction; execution resumes with the instruction following the string. For example:
1
2
3
WrMsg()
.text “This text is sent to the console…\n”
* …next instruction…
WrCh()– write theASCIIcharacter found inR0to the consoleGetKey()– return the nextASCIIcharacter from the keyboard inR0; this call does not return to the user (blocks) until there is a character available.HexPrt()– convert the value passed in R0 to a hexadecimal string and output it to the console.Wait()– implement atomicWAIToperation on the integer semaphore whose address is passed inR3.Signal()– implement atomicSIGNALoperation on the integer semaphore whose address is passed inR3.Yield()– immediately schedule the next user-mode program for execution. Execution will resume in the usual fashion when the round-robin scheduler chooses this process again.
Supervisor calls are actually unimplemented instructions that cause the expected trap when executed. Any illegal instruction will cause the ILLOP handler to be executed:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
I_IllOp:
SAVESTATE() | Save the machine state.
LD(KStack, SP) | Install kernel stack pointer.
LD(XP, -4, r0) | Fetch the illegal instruction
SHRC(r0, 26, r0) | Extract the 6-bit OPCODE
SHLC(r0, 2, r0) | Make it a WORD (4-byte) index
LD(r0, UUOTbl, r0) | Fetch UUOTbl[OPCODE]
JMP(r0) | and dispatch to the UUO handler.
.macro UUO(ADR) LONG(ADR+PC_SUPERVISOR) | Auxiliary Macros
.macro BAD() UUO(UUOError)
UUOTbl: BAD() UUO(SVC_UUO) BAD() BAD()
....
The illegal instruction trap handler looks for illegal instructions it knows to be supervisor calls and calls the appropriate handler defined in SVC_UUO, which makes use of the SVC_Tbl to branch to the appropriate trap handler based on the service call being made:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
SVC_UUO:
LD(XP, -4, r0) | The faulting instruction.
ANDC(r0,0x7,r0) | Pick out low bits,
SHLC(r0,2,r0) | make a word index,
LD(r0,SVCTbl,r0) | and fetch the table entry.
JMP(r0)
SVCTbl: UUO(HaltH) | SVC(0): User-mode HALT instruction
UUO(WrMsgH) | SVC(1): Write message
UUO(WrChH) | SVC(2): Write Character
UUO(GetKeyH) | SVC(3): Get Key
UUO(HexPrtH) | SVC(4): Hex Print
UUO(WaitH) | SVC(5): Wait(S) ,,, S in R3
UUO(SignalH) | SVC(6): Signal(S), S in R3
UUO(YieldH) | SVC(7): Yield()
The translation between SVC(0) to Halt(), SVC(1) to WrMsg() and so on is declared as macros to interface with the Kernel code.
1
2
3
4
5
6
7
8
9
10
11
||| Definitions of macros used to interface with Kernel code:
.macro Halt() SVC(0) | Stop a process.
.macro WrMsg() SVC(1) | Write the 0-terminated msg following SVC
.macro WrCh() SVC(2) | Write a character whose code is in R0
.macro GetKey() SVC(3) | Read a key from the keyboard into R0
.macro HexPrt() SVC(4) | Hex Print the value in R0.
.macro Yield() SVC(7) | Give up remaining quantum
Note that this is just for convenience. The macro declarations are made so that we can conveniently write Halt() as part of our instruction instead of the more primitive instruction of SVC(0).
Scheduler
The timesharing system is supported by a round-robin scheduler,
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Scheduler:
PUSH(LP)
CMOVE(UserMState, r0)
LD(CurProc, r1)
CALL(CopyMState) | Copy UserMState -> CurProc
LD(CurProc, r0)
ADDC(r0, 4*31, r0) | Increment to next process..
CMPLTC(r0,CurProc, r1) | End of ProcTbl?
BT(r1, Sched1) | Nope, its OK.
CMOVE(ProcTbl, r0) | yup, back to Process 0.
Sched1: ST(r0, CurProc) | Here's the new process;
ADDC(r31, UserMState, r1) | Swap new process in.
CALL(CopyMState)
LD(Tics, r0) | Reset TicsLeft counter
ST(r0, TicsLeft) | to Tics.
POP(LP)
JMP(LP) | and return to caller.
..and the necessary kernel data structures to support multiple user-mode programs such as the process table that saves the states of the paused process so we can resume them later when it is their turn to run again:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
ProcTbl:
STORAGE(29) | Process 0: R0-R28
LONG(P0Stack) | Process 0: SP
LONG(P0Start) | Process 0: XP (= PC)
STORAGE(29) | Process 1: R0-R28
LONG(P1Stack) | Process 1: SP
LONG(P1Start) | Process 1: XP (= PC)
STORAGE(29) | Process 2: R0-R28
LONG(P2Stack) | Process 2: SP
LONG(P2Start) | Process 2: XP (= PC)
CurProc: LONG(ProcTbl)
The scheduler is invoked by periodic clock interrupts or when a user-mode program makes a Yield() supervisor call. Notice that we use the clock option in the beginning of the script:
1
.options clock
This clock will cause asynchronous interrupt that calls BR(I_Clk) on every rising edge. This handler labelled I_Clk decides whether a process swap swap is needed or not.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
||| Each compute-bound process gets a quantum consisting of TICS clock
||| interrupts, where TICS is the number stored in the variable Tics
||| below. To avoid overhead, we do a full state save only when the
||| clock interrupt will cause a process swap, using the TicsLeft
||| variable as a counter.
Tics: LONG(2) | Number of clock interrupts/quantum.
TicsLeft: LONG(0) | Number of tics left in this quantum
I_Clk: ENTER_INTERRUPT() | Adjust the PC!
ST(r0, UserMState) | Save R0 ONLY, for now.
LD(TicsLeft, r0) | Count down TicsLeft
SUBC(r0,1,r0)
ST(r0, TicsLeft) | Now there's one left.
CMPLTC(r0, 0, r0) | If new value is negative, then
BT(r0, DoSwap) | swap processes.
LD(UserMState, r0) | Else restore r0, and
JMP(XP) | return to same user.
DoSwap: LD(UserMState, r0) | Restore r0, so we can do a
SAVESTATE() | FULL State save.
LD(KStack, SP) | Install kernel stack pointer.
CALL(Scheduler) | Swap it out!
BR(I_Rtn) | and return to next process.
User Programs
tinyOS_submit.uasm also contains code for three programs each of which runs in a separate user-mode process.
Process 0
Process 0 prompts the user for new lines of input in P0Read. It then reads lines from the keyboard in P0RdCh using the GetKey() supervisor call and sends them to Process 1 in P0PutC using the Send() procedure.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
Prompt: semaphore(1) | To keep us from typing next prompt
| while P1 is typing previous output.
P0Start:WrMsg()
.text "Start typing, Bunky.\n\n"
P0Read: Wait(Prompt) | Wait until P1 has caught up...
WrMsg() | First a newline character, then
.text "\n"
LD(Count3, r0) | print out the quantum count
HexPrt() | as part of the count, then
WrMsg() | the remainder.
.text "> "
LD(P0LinP, r3) | ...then read a line into buffer...
P0RdCh: GetKey() | read next character,
WrCh() | echo back to user
CALL(UCase) | Convert it to upper case,
ST(r0,0,r3) | Store it in buffer.
ADDC(r3,4,r3) | Incr pointer to next char...
CMPEQC(r0,0xA,r1) | End of line?
BT(r1,P0Send) | yup, transmit buffer to P1
CMPEQC(r3,P0LinP-4,r1) | are we at end of buffer?
BF(r1,P0RdCh) | nope, read another char
CMOVE(0xA,r0) | end of buffer, force a newline
ST(r0,0,r3)
WrCh() | and echo it to the user
P0Send: LD(P0LinP,r2) | Prepare to empty buffer.
P0PutC: LD(r2,0,r0) | read next char from buf,
CALL(Send) | send to P1
CMPEQC(r0,0xA,r1) | Is it end of line?
BT(r1,P0Read) | Yup, read another line.
ADDC(r2,4,r2) | Else move to next char.
BR(P0PutC)
P0Line: STORAGE(100) | Line buffer.
P0LinP: LONG(P0Line)
P0Stack:
STORAGE(256)
Send() implements a bounded buffer synchronized through the use of semaphores . It is not required for you now to fully understand what semaphore is, except that it is a service provided by the Kernel so that two isolated processes running on a Virtual Machine can communicate and synchronize.
You can read Appendix 1 below for more details.
1
2
3
4
5
6
7
8
9
Chars: semaphore(0) | Flow-control semaphore 1
Holes: semaphore(FIFOSIZE) | Flow-control semaphore 2
||| Send: put <r0> into fifo.
Send: PUSH(r1) | Save some regs...
PUSH(r2)
Wait(Holes) | Wait for space in buffer...
...
There are other auxiliaries created for the user programs, such as to convert char in r0 to upper case (UCase) and test if R0 is a vowel; put boolean answer into R1 (VowelP). You can read their instructions near the end of P0 instructions in tinyOS_submit.uasm.
Process 1
Process 1 reads lines of inputs from the bounded buffer (using the Rcv() procedure):
1
2
3
4
5
6
7
8
||| Rcv: Get char from fifo into r0.
Rcv: PUSH(r1)
PUSH(r2)
Wait(Chars) | Wait until FIFO non-empty
LD(OUT,r1) | OUT pointer...
....
Then, translates them into Pig Latin and types them out on the console (using the WrMsg() and WrCh() supervisor calls). You can scan through the relevant instructions here:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
P1Start:
LD(P1BufP, r9) | Buffer pointer in r9.
P1Word: MOVE(r9,r5) | Read initial consonants.
P1Cons: CALL(Rcv)
CALL(VowelP) | Is it a vowel?
BT(r1,P1Vowl) | yup, move on.
CMPLEC(r0,' ',r1) | Is it white space?
BT(r1,P1Spc)
ST(r0,0,r5) | Else store it into buffer...
ADDC(r5,4,r5) | ... and bump pointer.
BR(P1Cons) | Back for more.
P1Vowl: WrCh() | Output the vowel,
CALL(Rcv) | then check again.
CMPLEC(r0,' ',r1) | White space?
BF(r1,P1Vowl)
P1Spc: MOVE(r0,r3) | Save input char, then
MOVE(r9,r4) | Output initial consonant.
P1Spc2: CMPEQ(r4,r5,r1) | Any left?
BT(r1,P1Spc1) | nope...
LD(r4,0,r0) | Fetch next char,
ADDC(r4,4,r4) | (next time, next char)
WrCh() | and write it out.
BR(P1Spc2)
P1Spc1: WrMsg() | Add the "AY" suffix.
.text "AY"
MOVE(r3,r0) | Then the saved input char.
WrCh()
CMPEQC(r3,0xA,r0) | Was it end-of-line?
BF(r0,P1Word) | nope.
Signal(Prompt) | it was; allow proc 0 to re-prompt.
BR(P1Word) | ... and start another word.
P1Buf: STORAGE(100) | Line buffer.
P1BufP: LONG(P1Buf) | Address of line buffer.
P1Stack: STORAGE(256) | Stack for process 2.
Process 2
Each time this process is executed, it simply increments a counter and uses the Yield() supervisor call to give up the remainder of its quantum.
1
2
3
4
5
6
7
8
9
10
P2Start:
LD(Count3, r0) | Another quantum, incr count3.
ADDC(r0,1,r0)
ST(r0,Count3)
Yield() | Invoke scheduler
BR(P2Start) | return here after others run.
P2Stack: STORAGE(256)
Count3: LONG(0)
This process is the reason why we can see the value 0x000711BC appearing in the prompt screenshot above.
This count is used as part of the prompt displayed by Process 0:
1
2
3
4
5
6
...
P0Read: Wait(Prompt) | Wait until P1 has caught up...
WrMsg() | First a newline character, then
.text "\n"
LD(Count3, r0) | print out the quantum count
...
Task A: Add mouse interrupt handler
When you click the mouse over the console pane, BSim generates an interrupt, forcing the PC to 0x800000010 and saving PC+4 of the interrupted instruction in the XP register.
Note that as mentioned in the section above, the Beta in this lab implements a vectored interrupt scheme where different types of interrupts force the PC to different addresses (rather than having all interrupts for the PC to 0x80000008 like we did for our basic Beta Processor in the previous lab). The following table shows how different exceptions are mapped to PC values:
1
2
3
4
5
0x80000000 reset
0x80000004 illegal opcode
0x80000008 clock interrupt (must specify “.options clk” to enable)
0x8000000C keyboard interrupt (must specify “.options tty” to enable)
0x80000010 mouse interrupt (must specify “.options tty” to enable)
This means that the first five instructions in tinyOS_submit.uasm contains instructions to branch out to the respective handler
1
2
3
4
5
6
7
8
9
10
. = VEC_RESET | This is loaded at address 0x80000000
BR(I_Reset) | on Reset (start-up)
. = VEC_II | This is loaded at address 0x80000004
BR(I_IllOp) | on Illegal Instruction (eg SVC)
. = VEC_CLK | This is loaded at address 0x80000008
BR(I_Clk) | On clock interrupt
. = VEC_KBD | This is loaded at address 0x8000000C
BR(I_Kbd) | on Keyboard interrupt
. = VEC_MOUSE | This is loaded at address 0x80000010
BR(I_BadInt) | on mouse interrupt
Recall that only user-mode programs can be interrupted. Interrupts signaled while the Beta is running in kernel-mode (e.g., handling another interrupt or servicing a supervisor call) have no effect until the processor returns to user-mode.
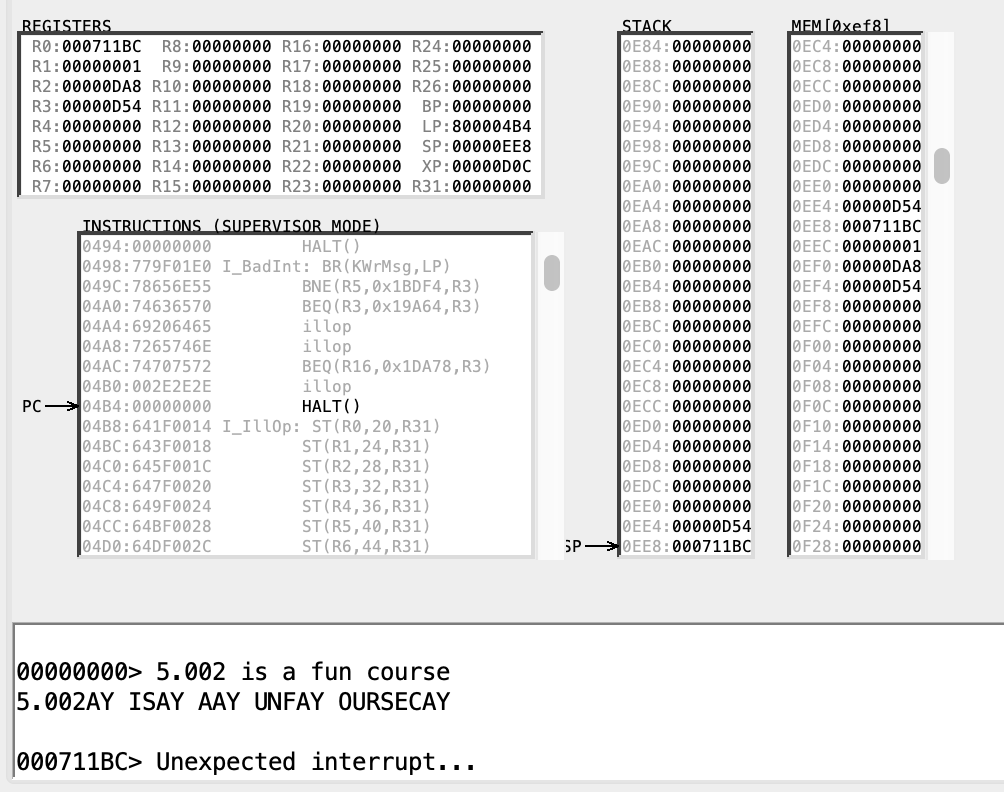
The original tinyOS_submit.uasm prints out “Illegal interrupt” and then halts if a mouse interrupt is received:
Change this behavior by:
- Adding an interrupt handler that stores the click information in a new kernel memory location and then,
- Returns to the interrupted process.
You might find the keyboard interrupt handler I_Kbd a good model to follow.
The CLICK() instruction
For this Lab, we added a new Beta instruction your interrupt handler can use to retrieve information about the last mouse click: CLICK()
- This instruction can only be executed when in kernel mode (e.g., from inside the mouse click interrupt handler).
- It returns a value in
R0: -1if there has not been a mouse click since the last timeCLICK()was executed, or - A 32-bit integer with:
- The
Xcoordinate of the click in the high-order 16 bits of the word, and - The
Ycoordinate of the click in the low-order 16 bits. - The coordinates are non-negative and relative to the upper left hand corner of the console pane.
- In our scenario,
CLICK()should only be called AFTER a mouse click, so we should never see-1as a return value.
- The
Testing Your Implementation with .breakpoint
Insert a .breakpoint instruction right before the JMP(XP) at the end of your mpouse interrupt handler, run the program and click the mouse over the console pane.
If things are working correctly the simulation should stop at the breakpoint and you can examine the kernel memory location where the mouse info was stored to verify that it is correct. In the sample below, we name the memory location as Mouse_State, and the value in the red box signifies the coordinates of the mouse click made in the console pane.
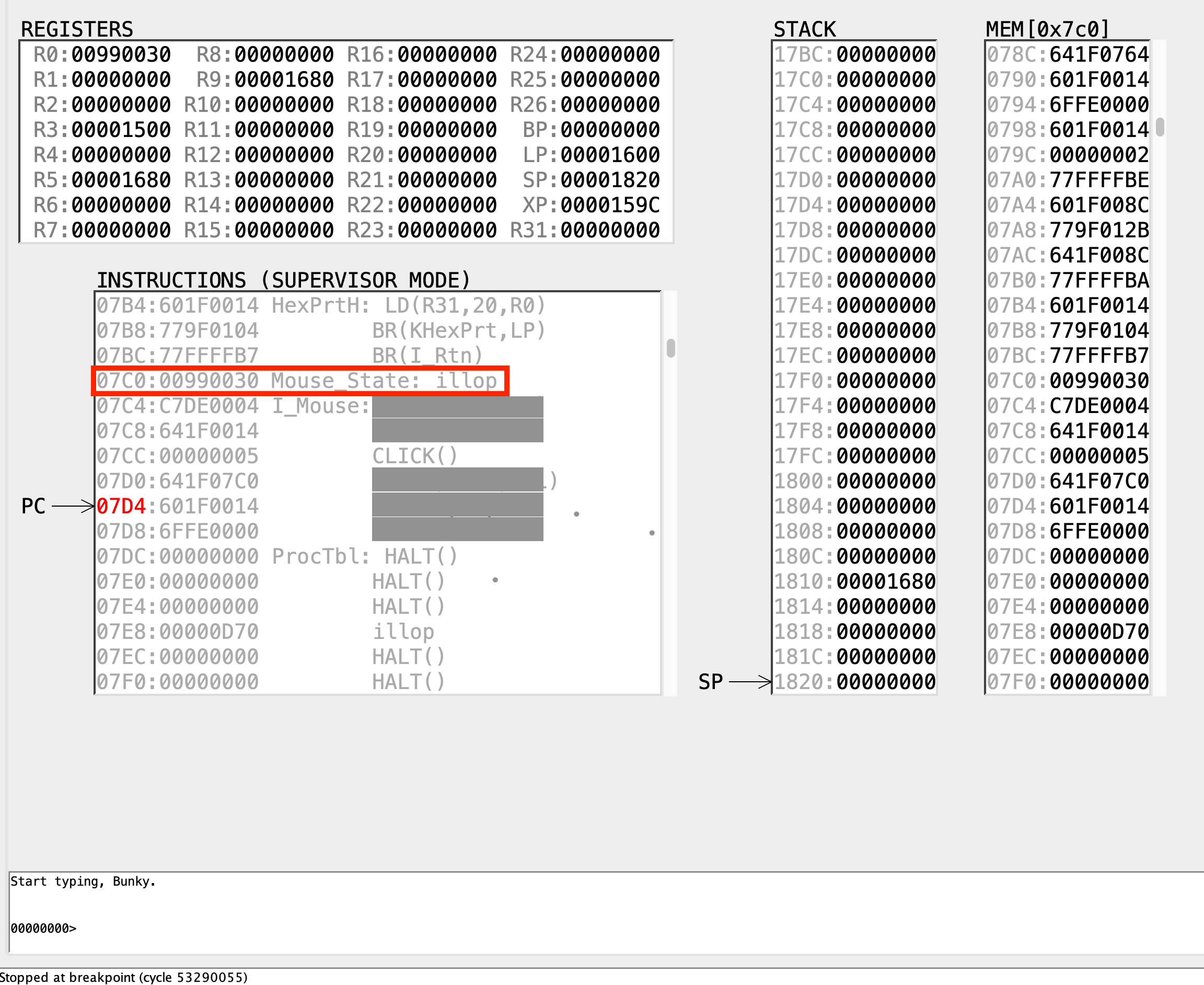
Continuing execution (click the “Run” button in the toolbar at the top of the window) should return to the interrupted program. When you’re done remember to remove the breakpoint.
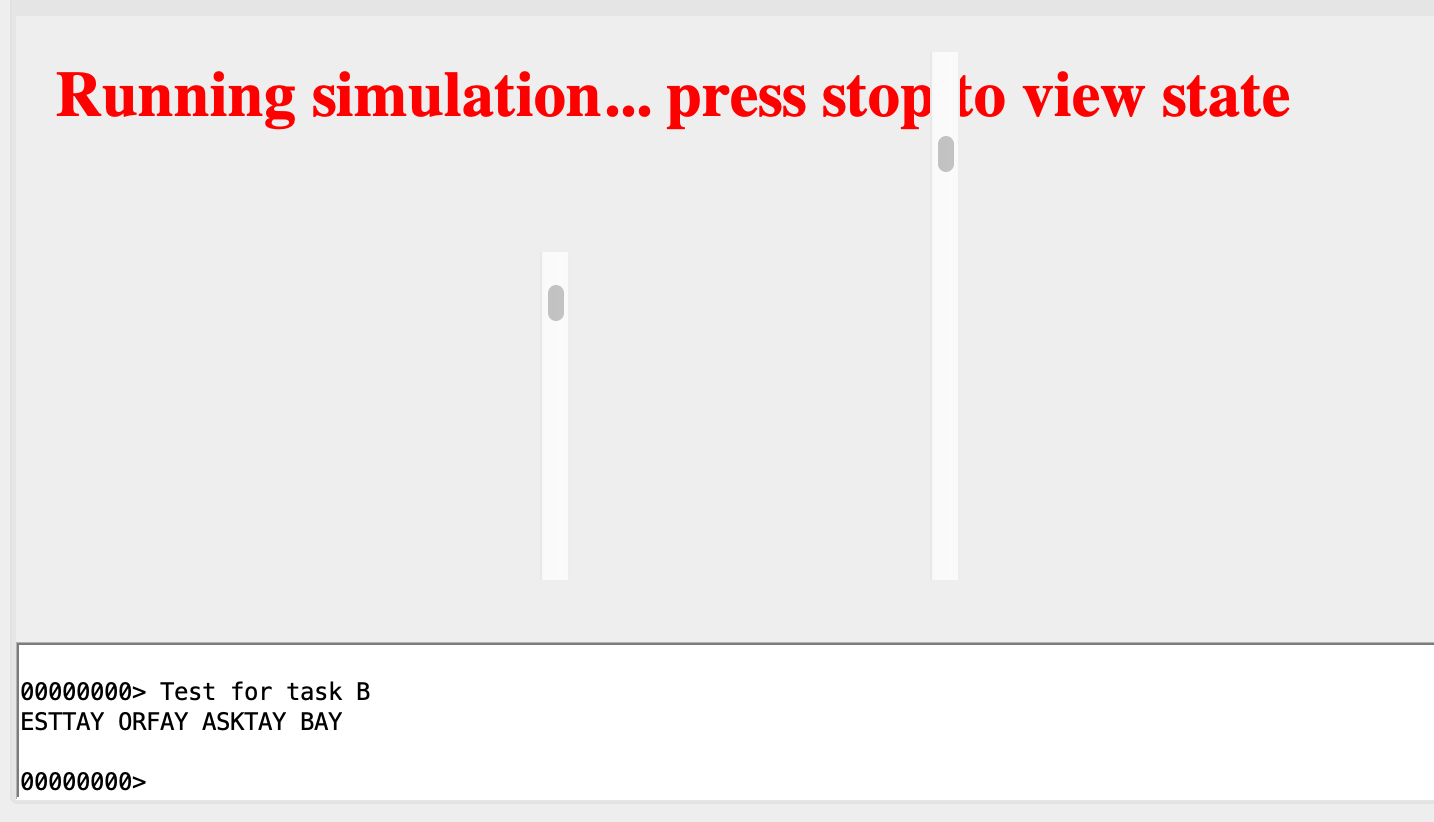
Task B: Add Mouse() Supervisor Call
Now our job is to retrieve the mouse click coordinates that is stored in the Kernel variable Mouse_State in the sample screenshot above. Implement a Mouse() supervisor call that returns the coordinate information from the most recent mouse click (i.e., the information stored by the mouse interrupt handler).
Like GetKey() supervisor call to retrieve keyboard press, a user-mode call to Mouse() should consume the available click information:
- If no mouse click has occurred since the previous call to Mouse(), the supervisor call should “hang” (block execution) until new click information is available.
- “Hang” means that the supervisor call should back up the saved PC so that the next user-mode instruction to be executed is the
Mouse()call and then branch to the scheduler to run some other user-mode program. - Thus when the calling program is rescheduled for execution at some later point, the
Mouse()call is re-executed and the whole process repeated. - From the user’s point of view, the
Mouse()call completes execution only when there is new click information to be returned. - The
GetKey()supervisor call is a good model to follow.
To define a new supervisor call Mouse(), add the following definition just after the definition for .macro Yield() SVC(7):
1
.macro Mouse() SVC(8)
This is the ninth supervisor call and the current code at SVC_UUO was tailored for processing exactly eight supervisor calls, so you’ll need to make the appropriate modifications to SVC_UUO instructions:
1
2
3
4
5
6
7
8
||| Sub-handler for SVCs, called from I_IllOp on SVC opcode:
SVC_UUO:
LD(XP, -4, r0) | The faulting instruction.
ANDC(r0,0x7,r0) | Pick out low bits, should you modify this to support more supervisor calls?
SHLC(r0,2,r0) | make a word index,
LD(r0,SVCTbl,r0) | and fetch the table entry.
JMP(r0)
Testing Your Implementation
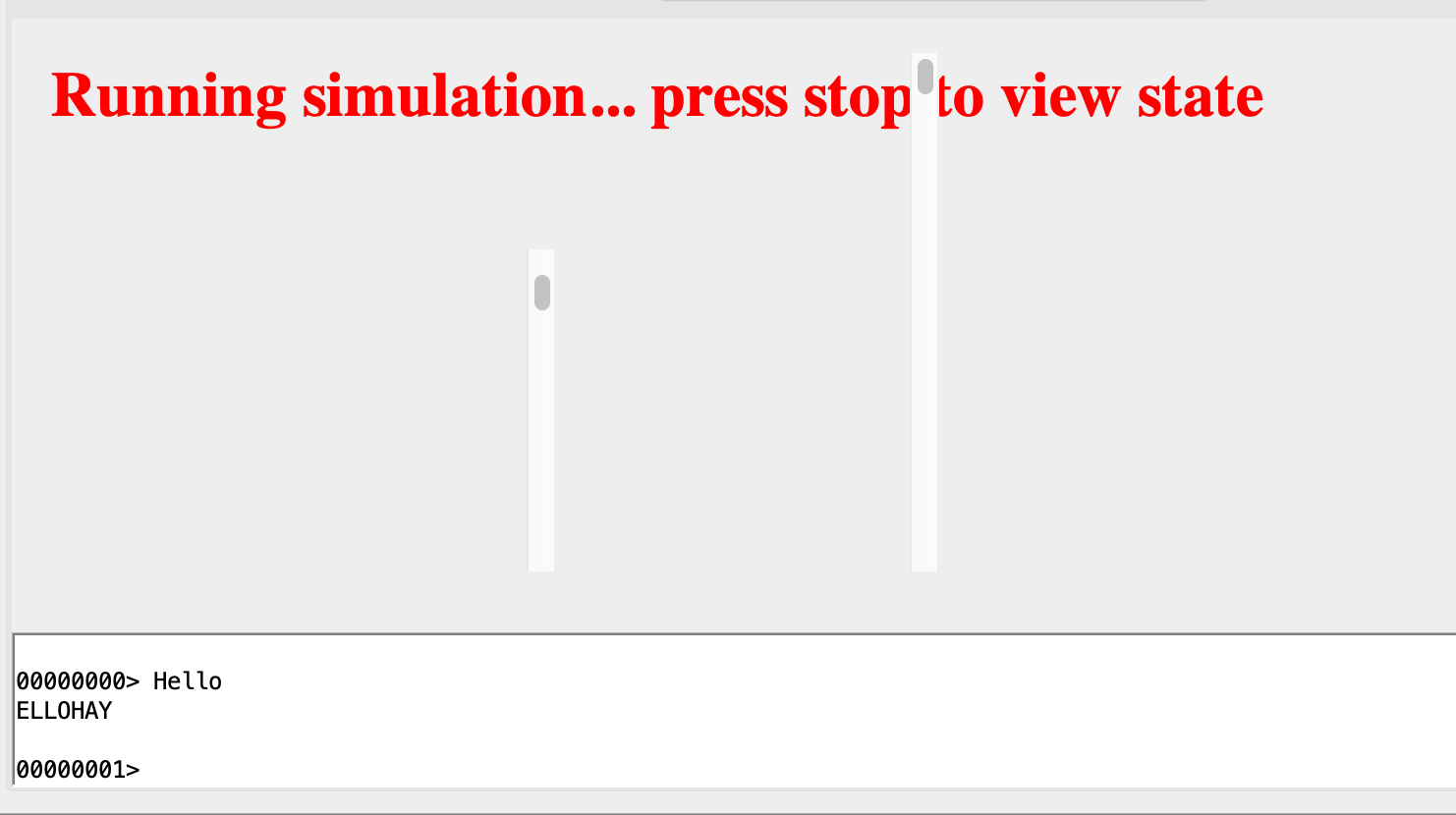
Once your Mouse() implementation is complete, add a Mouse() instruction just after P2Start. If things are working correctly, this user-mode process should now hang and Count3 should not be incremented even if you type in several sentences (i.e., the prompt should always be “00000000>”).
- Now click the mouse once over the console pane and then type more sentences
- The prompt should read
00000001>
When you are done, remember to remove the Mouse() instruction you added.
Task C: Add fourth user-mode process P3 that reports mouse clicks
In this task, we would have to modify the kernel to add support for a fourth user-mode process. Add user-mode code for the new process that calls Mouse() and then prints out a message of the form:
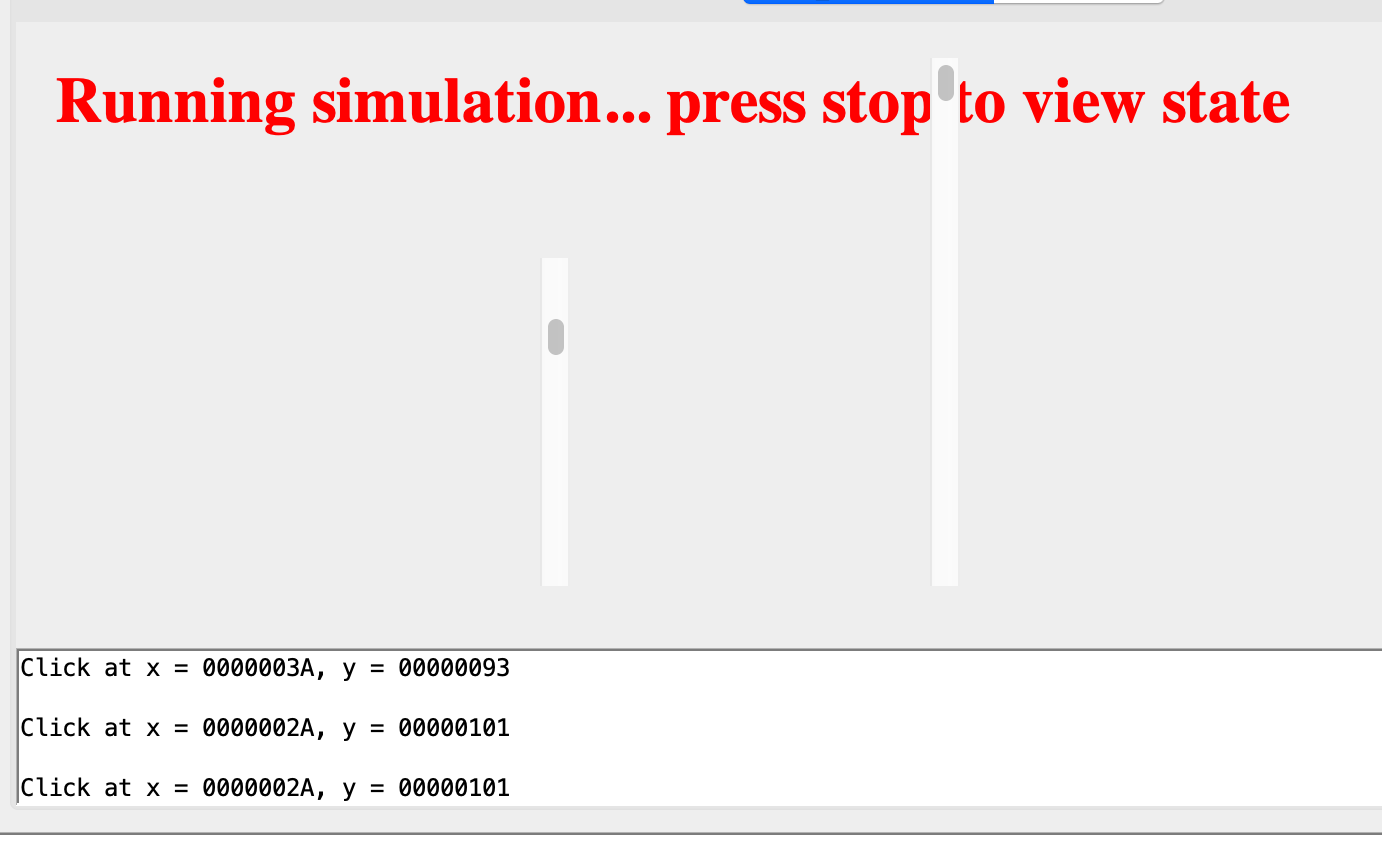
Each click message should appear on its own line (i.e., it should be preceded and followed by a newline character). You can use WrMsg() and HexPrt() to send the message; see the code for **Process 0 **for an example of how this is done. Write the instruction for P3 below P2:
1
2
3
4
5
6
7
8
9
10
11
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
||| PART 3: USER MODE Process 3 -- Display Mouse info click
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
P3Start:
| .breakpoint, debugging
GetMouse() | PART 3 -- get mouse info and store to r0
... your answer here
You also need to modify the Kernel’s process table to support the scheduling of four processes instead of three:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
||| The kernel variable CurProc always points to the ProcTbl entry
||| corresponding to the "swapped in" process.
ProcTbl:
STORAGE(29) | Process 0: R0-R28
LONG(P0Stack) | Process 0: SP
LONG(P0Start) | Process 0: XP (= PC)
STORAGE(29) | Process 1: R0-R28
LONG(P1Stack) | Process 1: SP
LONG(P1Start) | Process 1: XP (= PC)
STORAGE(29) | Process 2: R0-R28
LONG(P2Stack) | Process 2: SP
LONG(P2Start) | Process 2: XP (= PC)
.. add more process table here
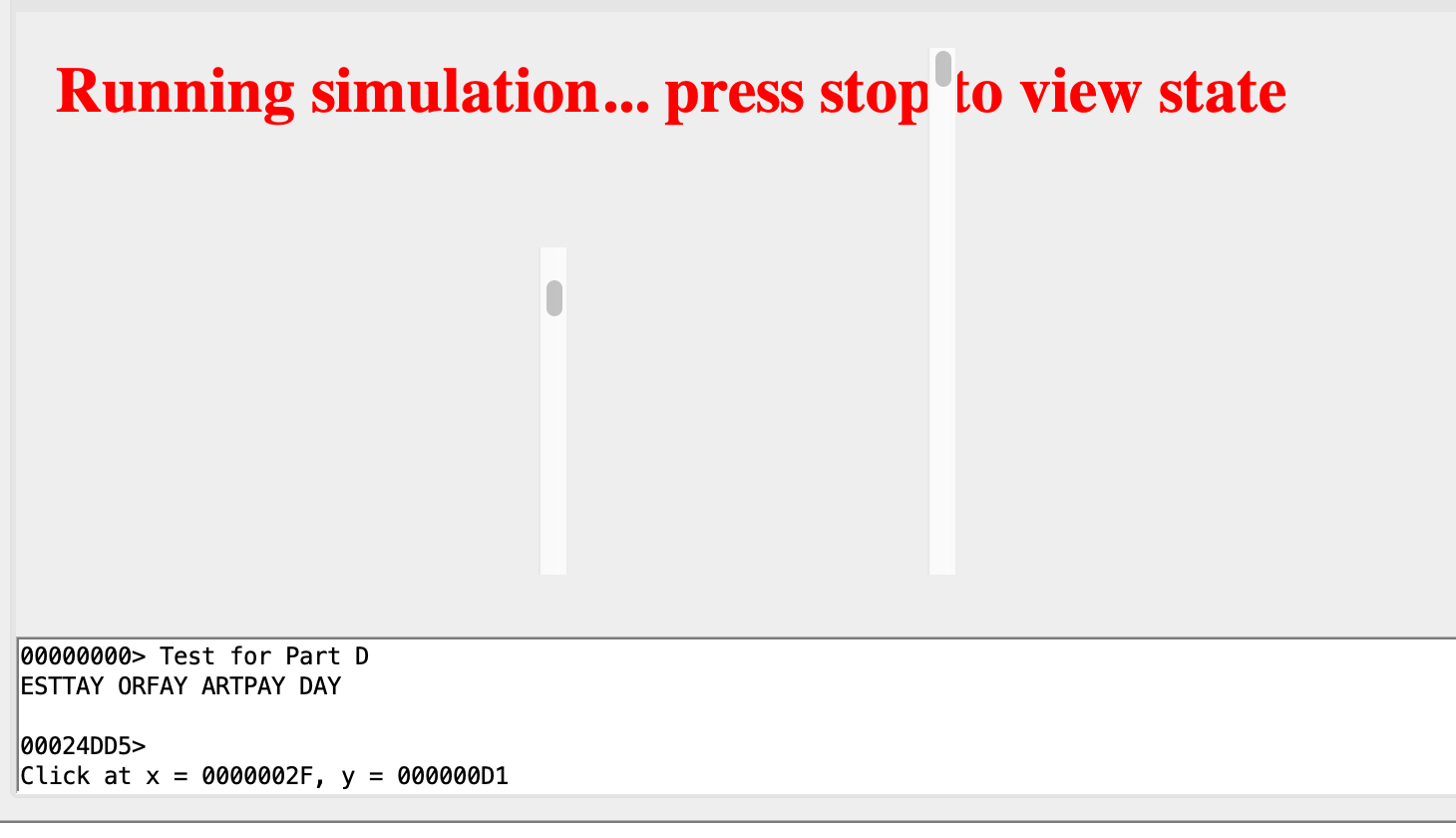
Task D: Synchronize mouse reporting with other I/O using Semaphores
Using semaphores, coordinate the operation of the user-mode processes so that click messages only appear after the prompt has been output but before you have started typing in a sentence to be translated.
- In other words, once you start typing in a sentence, click messages should be delayed until after the next prompt.
- If the user clicks multiple times after they have started typing, only a SINGLE click message needs to be displayed (describing either the first or last click, your choice).
Testing your implementation
Start typing in a sentence, then click the mouse. The click message should be printed after the translation and the following prompt has been printed.
Hints
You may declare a mouse semaphore in P3, and immediately Wait (attempt to decrease) for the Semaphore:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
MouseSemaphore: semaphore(0) | Semaphore for mouse, Part D, initialised from zero
P3Start:
| .breakpoint, debugging
Wait(MouseSemaphore) | proceed only when prompt has shown -- Part D
GetMouse() | Part C -- get mouse info and store to r0
... implement printing of click coordinates here
Signal(Prompt) | signal the prompt so it will print another prompt
... continue implementation
You may also need two more supervisor calls to check for keyboard press and check for mouse click that is non blocking because we need to know whether we have typed something (and block the mouse click printout in P3):
1
2
.macro CheckMouse() SVC(9) | Part D: TO CHECK MOUSE CLICK, NON BLOCKING
.macro CheckKeyboard() SVC(10) | Part D: TO CHECK KEYBOARD CLICK, NON BLOCKING
Update the corresponding SVC_tbl to support these two:
1
2
3
4
5
SVCTbl: UUO(HaltH) | SVC(0): User-mode HALT instruction
UUO(WrMsgH) | SVC(1): Write message
...
UUO(CheckMouseH)| SVC(9) : CheckMouse()
UUO(CheckKeyH) | SVC(10) : CheckKeyboard()
The implementation of the two service handlers above is suggested to be as follows:
1
2
3
4
5
6
7
8
9
10
11
||| Part D: add new handler to check keyboard state, but doesn't clear it and doesn't block the calling process
CheckKeyH:
LD(Key_State, r0)
ST(r0,UserMState) | return it in R0.
BR(I_Rtn) | and return to user.
||| Part D: add new handler to check mouse state, but doesn't clear it and doesn't block the calling process
CheckMouseH:
LD(Mouse_State, r0) | put the content of Mouse_State to R0
ST(r0,UserMState) | return it in R0 of the user state since UserMState points to the R0 of the user reg value
BR(I_Rtn) | and return to user
And then, somewhere in P0 after the prompt is printed out, you should check whether there exist mouse click OR keyboard click, and signal (increase) the semaphore accordingly:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
P0Read: Wait(Prompt) | Wait until P1 has caught up...
WrMsg() | First a newline character, then
.text "\n"
LD(Count3, r0) | print out the quantum count
HexPrt() | as part of the count, then
WrMsg() | the remainder.
.text "> "
LD(P0LinP, r3) | ...then read a line into buffer...
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
||||| Part D TO SYNCHRONISE, busy wait
beginCheckMouse: CheckMouse()
BEQ(R0, beginCheckKeyboard) | go and check for keyboard press if there's no mouse click
| If there's no mouse click, P3 is stuck at GetMouse() anyway
Signal(MouseSemaphore) | if there mouse click, give signal for P3 to continue
Yield() | stop execution
BR(P0Read) | and restart process
beginCheckKeyboard: CheckKeyboard()
BEQ(R0, beginCheckMouse)
||||| END OF Part D
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
P0RdCh: GetKey() | read next character,
WrCh() | echo back to user
...
Fun fact: P0 doesn’t have to confirm until P3 has finished its one round of execution (printing of x, y coordinate) before restarting to
BR(P0Read)because we know that the round robin scheduler will surely execute P3 for a round once P0 callsYield(). Thanks to the scheduler’s round robin policy and long enough quanta dedicated for each process, there won’t be the undesirable condition whereby P0Yield()immediately returns execution to P0 again, before P3 resumes and thenSignaltheMouseSemaphorethe second time (because it hasn’t been cleared by P3 that hasn’t progressed!). If this happens,MouseSemaphorevalue might accidentally be increased to 2 and we might have a futureClickmessage printed out at the same time while typing some messages at the console, violating the condition required for this Part 4. To fix this, we might have to check that a new mouse click is actually made inCheckMouseHby storing the previous history of mouse click at all times.
If all three parts are working correctly the appropriate message should be printed out whenever you click the mouse over the console pane as shown in the screenshot above. You may find it necessary to use .breakpoint commands to debug your user-mode code.
Appendix 1: Kernel Semaphore
A semaphore is a variable used to control access to a common resource by multiple processes. In other words, it is a variable controlled by the Kernel to allow two or more processes to synchronise. The semaphore can be seen as a generalised mutual exclusion (mutex) lock. It is implemented at the kernel level, meaning that its execution (WaitH, and SignalH) requires the calling process to change into the kernel mode.
In its simplest form, it can be thought of as a data structure that contains a guarded integer that represents the number of resources available for the pool of processes that require it.
The instructions in tinyOS_submit.uasm that implements Semaphore is as follows:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
WaitH: LD(r3,0,r0) | Fetch semaphore value.
BEQ(r0,I_Wait) | If zero, block..
SUBC(r0,1,r0) | else, decrement and return.
ST(r0,0,r3) | Store back into semaphore
BR(I_Rtn) | and return to user.
||| Kernel handler: signal(s):
||| ADDRESS of semaphore s in r3.
SignalH:LD(r3,0,r0) | Fetch semaphore value.
ADDC(r0,1,r0) | increment it,
ST(r0,0,r3) | Store new semaphore value.
BR(I_Rtn) | and return to user.
Note that unlike real-world applications, this lab does not actually have physical separation in the memory between Kernel and User space in memory (although it has dual mode to prevent interrupts in Kernel mode) due to simplification. We can still perform a
LDto Kernel variables in User Mode in this lab.